![]()
ОъОўОЋОўОюОф ОъОфОъОўОЎОф (ОаОДОеОљОф ОњОЮ ОъОўОЋОўОюОф ОцОЕОЋОўОћ) ОћОЎОљ ОъОўОЋОўОюОф ОЕОъОЋОеОЏОЉОф ОъОњОЋОБ ОЉОбОю ОъОъОЊОЎОЮ ОДОўОаОЎОЮ, ОћОфОюОЋОЎ ОбОю ОЌОЋОў ОЕОъОАОфОЋ ОЋОъОЎОЊОф ОћОћОфОљОеОЏОЋОф ОЕОюОЋ ОЉОќОъОЪ ОћОфОаОЋОЊОЋОф ОаОЎОфОаОЎОЮ ОюОћОќОаОЌОћ. ОЉОаОЋОАОБ, ОќОЋОЋОЎОф ОћОфОаОЋОЊОћ ОЕОю ОћОъОўОЋОўОюОф ОДОўОаОћ ОЎОЌОАОЎОф. ОќОћОЋ ОъОЋОЊОю ОцОЎОќОЎОДОюОЎ, ОЕОљОЎОаОЋ ОДОЎОЎОЮ ОЉОљОЋОцОЪ ОъОЋОЕОюОЮ ОЉОъОдОЎОљОЋОф, (ОЋОюОЏОЪ ОћОъОЋОЊОю ОъОЏОЋОаОћ ОъОўОЋОўОюОф ОъОфОъОўОЎОф), ОљОџ ОЉОќОЏОЋОф ОћОДОЎОеОЋОЉ ОаОЎОфОЪ ОюОфОљОе ОљОф ОфОаОЋОбОф ОћОњОЋОБ ОЉОљОЋОцОЪ ОцОЕОЋОў. ОфОЌОф ОДОЎОеОЋОЉ ОќОћ ОъОўОЋОўОюОф ОъОфОъОўОЎОф ОћОЎОљ ОАОЋОњ ОЕОю ОљОЋОАОдОЎОюОўОЋОе ОћОеОъОЋОаОЎ, ОЋОюОЏОЪ ОъОћОЋОЋОћ ОъОЋОЊОю ОюОфОЋОцОбОЋОф ОцОЎОќОЎОДОюОЎОЋОф ОеОЉОЋОф.
ОюОљОЌОе ОћОАОўОф ОћОњОЋОБ ОъОаОДОЋОЊОф ОЕОЎОЋОЋОЎ ОћОъОЕОДОю ОЋОЕОЌОеОЋОеОЋ, ОћОњОЋОБ ОЎОЉОдОб ОфОаОЋОЊОЋОф ОћОеОъОЋОаОЎОЋОф ОЉОъОЎОЕОЋОе ОљОаОЏОЎ ОАОЉОЎОЉ ОаОДОЋОЊОф ОЕОЎОЋОЋОЎ ОћОъОЕОДОю-ОюОљОЋОеОџ ОДОЕОф ОъОбОњОю. ОќОъОЪ ОћОъОЌОќОЋОе ОЕОю ОфОаОЋОЊОЋОф ОъОўОЋОўОюОф ОъОфОъОўОЎОф ОљОЎОаОЋ ОфОюОЋОЎ ОЉОъОАОф ОћОъОЕОДОЋОюОф ОЋОЉОъОЕОеОбОф (ОќОЋОЋОЎОф) ОћОфОаОЋОЊОЋОф. ОќОЋОћОЎ ОфОЏОЋОаОћ ОЌОЕОЋОЉОћ, ОЕОЏОЪ ОћОЎОљ ОъОљОцОЕОеОф ОюОъОЊОЋОЊ ОъОеОЋОЋОЌОЎ ОќОъОЪ. ОЉОбОЉОе (ОбОЊ ОћОъОдОљОф ОћОЕОбОЋОЪ ОћОЌОЕОъОюОЎ) ОћОЕОфОъОЕОЋ ОЉОаОЎ ОћОљОЊОЮ ОЉОЕОбОЋОЪ ОћОъОЋОаОб ОбОю ОЎОЊОЎ ОъОўОЋОўОюОф.
ОаОЎОфОЋОЌ ОъОфОъОўОЎ
 ОљОаОЎОъОдОЎОћ ОЕОю ОфОаОЋОбОф ОъОўОЋОўОюОф, ОћОъОеОљОћ ОљОф ОћОЕОфОаОЋОф ОЋОДОўОЋОеОЎ ОћОъОћОЎОеОЋОф (V) ОЋОћОфОљОЋОдОћ (A).
ОљОаОЎОъОдОЎОћ ОЕОю ОфОаОЋОбОф ОъОўОЋОўОюОф, ОћОъОеОљОћ ОљОф ОћОЕОфОаОЋОф ОЋОДОўОЋОеОЎ ОћОъОћОЎОеОЋОф (V) ОЋОћОфОљОЋОдОћ (A).
 ОаОЎОфОЋОЌ ОћОЏОЋОЌОЋОф ОбОю ОъОўОЋОўОюОф ОъОфОъОўОЎОф
ОаОЎОфОЋОЌ ОћОЏОЋОЌОЋОф ОбОю ОъОўОЋОўОюОф ОъОфОъОўОЎОф
ОаОаОфОЌ ОљОф ОфОаОЋОбОф ОћОъОўОЋОўОюОф, ОЉОДОЎОеОЋОЉ ОЉОЋ ОћОЌОЋОў ОЌОАОе ОъОАОћ ОЋОљОЋОеОЏОЋ ОДОЉОЋОб, ОъОАОф ОћОъОўОЋОўОюОф ОаОДОЋОЊОфОЎОф, ОЋОќОЋОЋОЎОф ОћОфОаОЋОЊОћ ОДОўОаОћ. ОаОАОъОЪ:
 - ОљОЋОеОџ ОћОЌОЋОў
- ОљОЋОеОџ ОћОЌОЋОў - ОъОАОф ОћОъОЕОДОЋОюОф
- ОъОАОф ОћОъОЕОДОЋОюОф - ОфОљОЋОдОф ОћОЏОЋОЉОЊ
- ОфОљОЋОдОф ОћОЏОЋОЉОЊ - ОћОќОЋОЋОЎОф ОъОћОљОаОџ.
- ОћОќОЋОЋОЎОф ОъОћОљОаОџ.
ОаОаОфОЌ ОљОф ОћОъОЋОъОаОўОЎОЮ ОћОцОЋОбОюОЎОЮ ОбОю ОћОъОўОЋОўОюОф, ОЎОЌОАОЎОф ОюОаОДОЋОЊОф ОћОфОюОЎОЎОћ. ОъОЏОЎОЋОЋОЪ ОЕОћОЌОЋОў ОъОЌОЋОЉОе ОюОаОДОЋОЊОф ОћОфОюОЎОЎОћ, ОћОЋОљ ОљОЎОаОЋ ОъОцОбОЎОю ОъОЋОъОаОў. ОюОЏОЪ, ОћОъОЋОъОаОў ОћОЎОЌОЎОЊ ОћОцОЋОбОю ОбОю ОћОъОўОЋОўОюОф ОћОЋОљ ОћОъОЋОъОаОў ОЕОъОцОбОЎОю ОЏОЋОЌ ОћОЏОЋОЉОЊ, ОЋОњОЋОЊОюОЋ  . (ОћОАОЎОъОЪ ОЕОюОЎОюОЎ ОЏОЎОЋОЋОЪ ОЕОќОћОЋ ОЏОЋОЌ ОъОЌОќОЎОе, ОћОъОаОЋОњОЊ ОюОЏОЎОЋОЋОЪ ОћОћОбОфОД).
. (ОћОАОЎОъОЪ ОЕОюОЎОюОЎ ОЏОЎОЋОЋОЪ ОЕОќОћОЋ ОЏОЋОЌ ОъОЌОќОЎОе, ОћОъОаОЋОњОЊ ОюОЏОЎОЋОЋОЪ ОћОћОбОфОД).
ОъОЋОъОаОў ОћОћОфОъОЊ ОЕОю ОћОъОбОеОЏОф ОћОЋОљ ОцОЕОЋОў  , ОЋОюОЏОЪ ОъОфОДОЎОЎОЮ
, ОЋОюОЏОЪ ОъОфОДОЎОЎОЮ
 .
.
(ОаОЎОфОЪ ОюОћОњОЎОб ОюОаОЋОАОЌОћ ОќОЋ ОњОЮ ОбОю ОцОЎ ОъОЕОЋОЋОљОф ОћОфОаОЋОбОћ, ОъОЉОюОЎ ОюОћОЎОЏОаОА ОюОъОЋОъОаОў ОћОћОфОъОЊ .
ОћОЊОеОџ ОЕОЋОЋОћ ОюОљОЋОеОџ ОћОъОўОЋОўОюОф ОЏОцОЋОю ОћОќОЋОЋОЎОф (ОЉОеОЊОЎОљОаОЎОЮ) ОћОаОњОќОеОф ОћОЕОаОЎОЎОћ ОЕОю ОћОЊОеОџ ОЕОЋОЋОћ ОюОфОљОЋОдОћ ОЕОЕОЋОЋОћ Ою-g ОЏОцОЋОю ОАОЎОаОЋОА ОћОќОЋОЋОЎОф  )
)
ОЉОљОъОдОбОЋОф ОДОЎОеОЋОЉ ОќОЋОЋОЎОЋОф ОДОўОаОЋОф,  , ОаОДОЉОю ОъОЕОЋОЋОљОћ ОЕОю ОљОЋОАОдОЎОюОўОЋОе ОћОеОъОЋОаОЎ:
, ОаОДОЉОю ОъОЕОЋОЋОљОћ ОЕОю ОљОЋОАОдОЎОюОўОЋОе ОћОеОъОЋОаОЎ:

ОћОцОфОеОЋОЪ ОћОЏОюОюОЎ ОЕОю ОъОЕОЋОЋОљОћ ОќОЋ ОћОЋОљ:
 ,
,
ОЏОљОЕОе  , ОЋ
, ОЋ  ОаОДОЉОбОЎОЮ ОбОю ОЎОЊОЎ ОфОаОљОЎ ОћОћОфОЌОюОћ. ОќОЋОћОЎ ОцОЋОаОДОдОЎОћ ОъОЌОќОЋОеОЎОф, ОЉОфОЊОЎОеОЋОф
ОаОДОЉОбОЎОЮ ОбОю ОЎОЊОЎ ОфОаОљОЎ ОћОћОфОЌОюОћ. ОќОЋОћОЎ ОцОЋОаОДОдОЎОћ ОъОЌОќОЋОеОЎОф, ОЉОфОЊОЎОеОЋОф  , ОЋОЉОќОъОЪ ОъОЌОќОЋОе
, ОЋОЉОќОъОЪ ОъОЌОќОЋОе  .
.
ОћОъОеОЌОД ОъОаОДОЋОЊОф ОЕОЎОЋОЋОЎ ОћОъОЕОДОю ОћОЋОљ  (ОЕОЋОЉ, ОЉОДОЎОеОЋОЉ ОЕОю ОќОЋОЋОЎОЋОф ОДОўОаОЋОф), ОЋОюОЏОЪ ОњОЮ ОћОъОеОЌОД ОъОДОЎОЎОЮ ОфОаОЋОЊОћ ОћОеОъОЋОаОЎОф:
(ОЕОЋОЉ, ОЉОДОЎОеОЋОЉ ОЕОю ОќОЋОЋОЎОЋОф ОДОўОаОЋОф), ОЋОюОЏОЪ ОњОЮ ОћОъОеОЌОД ОъОДОЎОЎОЮ ОфОаОЋОЊОћ ОћОеОъОЋОаОЎОф:
 .
.
ОЉОљОЋОцОЪ ОЏОюОюОЎ, ОаОЎОфОЪ ОюОцОфОЋОе ОљОф ОћОъОЕОЋОЋОљОћ ОцОфОеОЋОЪ ОљОаОюОЎОўОЎ ОњОЮ ОюОюОљ ОћОДОЎОеОЋОЉ ОЕОю ОќОЋОЋОЎОЋОф ОДОўОаОЋОф, ОЉОбОќОеОф ОљОЎОаОўОњОеОю ОљОюОЎОцОўОЎ.
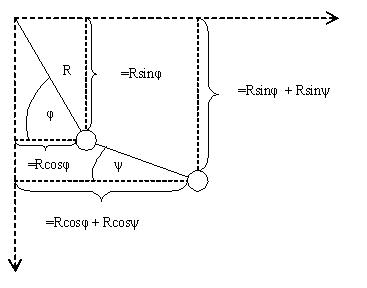
ОЉОъОбОеОЏОф ОќОЋ, ОЏОљОЕОе  ОћОЋОљ ОћОъОЎОюОўОЋОаОЎОљОЪ ОЋОЏОљОЕОе
ОћОЋОљ ОћОъОЎОюОўОЋОаОЎОљОЪ ОЋОЏОљОЕОе  ОЕОеОўОЋОў ОћОцОљОќОћ ОЎОфОЪ ОћОцОеОЊОћ ОЉОЎОЪ ОЕОаОЎ ОљОќОЋОеОЎОЮ. ОћОцОеОЊОћ ОќОЋ ОаОДОеОљОф ОАОцОеОўОеОЎОДОА.
ОЕОеОўОЋОў ОћОцОљОќОћ ОЎОфОЪ ОћОцОеОЊОћ ОЉОЎОЪ ОЕОаОЎ ОљОќОЋОеОЎОЮ. ОћОцОеОЊОћ ОќОЋ ОаОДОеОљОф ОАОцОеОўОеОЎОДОА.
ОцОфОеОЋОЪ ОъОЊОЋОЎОД
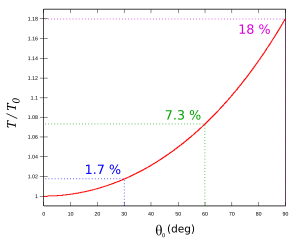 ОћОАОўОЎОЎОћ ОЕОю ОќОъОЪ ОћОъОЌОќОЋОе ОъОќОъОЪ ОћОъОЌОќОЋОе ОћОъОЊОЋОЎОД, ОфОЋОџ ОДОЎОеОЋОЉ ОќОЋОЋОЎОЋОф ОДОўОаОЋОф. ОаОЎОфОЪ ОюОеОљОЋОф ОЏОЎ ОбОЊ ОюОќОЋОЋОЎОф ОъОцОфОЌ ОЕОю 30┬░, ОъОфОДОЉОю ОЊОЎОЋОД ОўОЋОЉ ОъОљОЋОЊ ОћОДОўОЪ Оъ-2%.
ОћОАОўОЎОЎОћ ОЕОю ОќОъОЪ ОћОъОЌОќОЋОе ОъОќОъОЪ ОћОъОЌОќОЋОе ОћОъОЊОЋОЎОД, ОфОЋОџ ОДОЎОеОЋОЉ ОќОЋОЋОЎОЋОф ОДОўОаОЋОф. ОаОЎОфОЪ ОюОеОљОЋОф ОЏОЎ ОбОЊ ОюОќОЋОЋОЎОф ОъОцОфОЌ ОЕОю 30┬░, ОъОфОДОЉОю ОЊОЎОЋОД ОўОЋОЉ ОъОљОЋОЊ ОћОДОўОЪ Оъ-2%.
ОЏОљОъОЋОе, ОаОЎОфОЪ ОюОъОдОЋОљ ОљОф ОќОъОЪ ОћОъОЌОќОЋОе ОЕОю ОъОўОЋОўОюОф ОцОЕОЋОўОћ ОњОЮ ОюОюОљ ОћОћОаОЌОћ ОЕОю ОќОЋОЋОЎОЋОф ОДОўОаОЋОф, ОљОЋОюОЮ ОцОфОеОЋОЪ ОќОћ ОљОЎОаОЋ ОљОаОюОЎОўОЎ (ОЏОюОЋОъОе, ОюОљ ОаОЎОфОЪ ОюОћОдОЎОњОЋ ОЏОћОеОЏОЉОћ ОЕОю ОцОЋОаОДОдОЎОЋОф ОљОюОъОаОўОеОЎОЋОф: ОцОЋОюОЎОаОЋОъОЎОЮ, ОљОДОАОцОЋОаОаОўОЎОЮ ОЋОцОЋОаОДОдОЎОЋОф ОўОеОЎОњОЋОаОЋОъОўОеОЎОЋОф). ОћОцОфОеОЋОЪ ОъОбОеОЉ ОљОЎОаОўОњОеОю ОљОюОЎОцОўОЎ, ОЕОљОЋОфОЋ ОЎОЕ ОюОЌОЕОЉ ОЉОљОЋОцОЪ ОаОЋОъОеОЎ.
ОъОЕОЎОъОЋОе ОљОаОеОњОЎОћ ОъОфОДОЉОю ОъОЎОЎОЊОЎОф ОЏОЎ  . ОЏОљОЕОе
. ОЏОљОЕОе  ОћОЋОљ ОћОћОцОеОЕ ОЉОЎОЪ ОњОЋОЉОћ ОћОъОўОЋОўОюОф ОюОњОЋОЉОћОћ ОћОъОДОАОЎОъОюОЎ. ОљОаОЋ ОЎОЋОЊОбОЎОЮ ОЏОЎ
ОћОЋОљ ОћОћОцОеОЕ ОЉОЎОЪ ОњОЋОЉОћ ОћОъОўОЋОўОюОф ОюОњОЋОЉОћОћ ОћОъОДОАОЎОъОюОЎ. ОљОаОЋ ОЎОЋОЊОбОЎОЮ ОЏОЎ  ОЋОюОЏОЪ
ОЋОюОЏОЪ
 .
.
ОъОдОЊ ОЕОаОЎ, ОъОЕОЎОДОЋОю ОњОљОЋОъОўОеОЎ ОаОЎОфОЪ ОюОеОљОЋОф ОЕ  , ОЏОљОЕОе
, ОЏОљОЕОе  ОћОЎОљ ОћОќОЋОЋОЎОф ОЕОЉОћ ОћОъОўОЋОўОюОф ОаОъОдОљОф ОЉОњОЋОЉОћОћ ОћОъОДОАОЎОъОюОЎ. ОъОфОДОЉОюОф ОћОъОЕОЋОЋОљОћ ОћОЊОЎОцОеОаОдОЎОљОюОЎОф
ОћОЎОљ ОћОќОЋОЋОЎОф ОЕОЉОћ ОћОъОўОЋОўОюОф ОаОъОдОљОф ОЉОњОЋОЉОћОћ ОћОъОДОАОЎОъОюОЎ. ОъОфОДОЉОюОф ОћОъОЕОЋОЋОљОћ ОћОЊОЎОцОеОаОдОЎОљОюОЎОф
 .
.
ОќОЋОћОЎ ОъОЕОЋОЋОљОћ ОцОеОЎОЊОћ, ОЋОдОеОЎОџ ОюОЉОдОб ОљОф ОћОљОЎОаОўОњОеОю
 .
.
ОаОЎОфОЪ ОюОДОЉОю ОљОф ОќОъОЪ ОћОъОЌОќОЋОе ОбОю ОЎОЊОЎ ОљОЎОаОўОњОеОдОЎОћ ОбОю ОеОЉОб ОъОЌОќОЋОе ОЋОћОЏОцОюОћ ОЉ-4:

ОљОЎОаОўОњОеОю ОќОћ ОљОЎОаОЋ ОцОфОЎОе ОљОаОюОЎОўОЎОф, ОљОџ ОаОЎОфОЪ ОюОћОЉОЎОбОЋ ОЉОљОъОдОбОЋОф  ОћОљОЎОаОўОњОеОю ОћОљОюОЎОцОўОЎ ОЕОю ОюОќ'ОаОЊОе ОъОћОАОЋОњ ОћОеОљОЕОЋОЪ, ОЏОџ:
ОћОљОЎОаОўОњОеОю ОћОљОюОЎОцОўОЎ ОЕОю ОюОќ'ОаОЊОе ОъОћОАОЋОњ ОћОеОљОЕОЋОЪ, ОЏОџ:
 .
.
ОћОеОЌОЉОћ - ОаОЎОфОЋОЌ ОћОљОЋОцОаОЎОЮ ОћОбОдОъОЎОЎОЮ ОюОъОўОЋОўОюОф ОЉОбОюОф N ОъОфОаОЊОЎОЮ ОдОъОЋОЊОЎОЮ
 ОбОеОџ ОъОЋОеОЌОЉ РђЊ ОъОўОЋОўОюОЋОф ОъОфОъОўОЎОЋОф ОдОъОЋОЊОЋОф
ОбОеОџ ОъОЋОеОЌОЉ РђЊ ОъОўОЋОўОюОЋОф ОъОфОъОўОЎОЋОф ОдОъОЋОЊОЋОф
ОъОўОЋОўОюОф ОЉОбОюОф N ОъОфОаОЊОЎОЮ ОдОъОЋОЊОЎОЮ, ОћОЎОљ ОЉОбОдОЮ ОъОАОцОе ОъОўОЋОўОюОЋОф ОћОДОЕОЋОеОЋОф ОќОЋ ОюОќОЋ ОЏОљОЕОе ОћОЌОЋОў ОЕОю ОћОеОљОЕОЋОаОћ ОЎОЋОдОљ ОъОАОЋОБ ОћОъОўОЋОўОюОф ОћОДОЋОЊОъОф. ОъОАОцОе ОћОљОЋОцОаОЎОЮ ОћОбОдОъОЎОЎОЮ ОЕОю ОъОўОЋОўОюОЋОф ОъОфОъОўОЎОЋОф ОдОъОЋОЊОЋОф, ОћОЋОљ ОЉОЊОЎОЋОД ОЏОъОАОцОе ОћОъОфОаОЊОЎОЮ ОћОдОъОЋОЊОЎОЮ ОЕОЉОћ. ОћОљОЋОцОаОЎОЮ ОћОбОдОъОЎОЎОЮ ОъОдОЉОЎОбОЎОЮ ОбОю ОљОЋОеОџ ОцОеОДОЎ ОћОќОъОЪ ОЕОЉОћОЮ ОћОъОбОеОЏОф ОЌОЋОќОеОф ОюОљОЋОфОЋ ОъОЉОаОћ ОъОеОЌОЉОЎ, ОюОюОљ ОЌОЕОЎОЉОЋОф ОюОќОЋОЋОЎОф ОЉОЎОЌОА ОюОљОаОџ ОюОеОдОцОћ, ОљОюОљ ОеОД ОюОќОЋОЋОЎОЋОф ОЉОфОЋОџ ОћОъОбОеОЏОф. ОбОЮ ОћОЋОАОцОф ОъОфОаОЊ ОдОъОЋОЊ ОюОъОўОЋОўОюОф, ОћОљОЋОцОаОЎОЮ ОћОбОдОъОЎОЎОЮ ОЕОюОћ ОъОфОцОюОњОЎОЮ ОЉОљОЋОцОЪ ОћОЉОљ: ОъОАОцОе ОћОљОЋОцОаОЎОЮ ОћОбОдОъОЎОЎОЮ ОЕОю ОћОъОбОеОЏОф ОњОЊОю ОЋОћОцОеОЕ ОћОбОеОЏОЎОЮ ОЉОЎОЪ ОљОЌОЊ ОюОъОЕОаОћОЋ ОДОўОЪ. ОЉОаОЋОАОБ ОюОЏОџ, ОћОЮ ОћОЋОюОЏОЎОЮ ОЋОъОфОЉОЊОеОЎОЮ.
ОаОЎОфОЋОЌ ОъОфОъОўОЎ ОбОЉОЋОе ОЕОаОЎ ОъОфОаОЊОЎОЮ ОдОъОЋОЊОЎОЮ
ОбОю ОъОаОф ОюОЌОЕОЉ ОљОф ОъОЕОЋОЋОљОЋОф ОћОфОаОЋОбОћ ОбОЉОЋОе ОъОўОЋОўОюОф ОЉОбОюОф ОЕОаОЎ ОњОЋОцОЎОЮ, ОаОЕОфОъОЕ ОЉОъОЕОЋОЋОљОЋОф ОљОЋОЎОюОе-ОюОњОеОљОаОќ'. ОюОцОЎ ОъОЕОЋОЋОљОЋОф ОљОюОЋ:

ОЏОљОЕОе: T - ОћОљОаОеОњОЎОћ ОћОДОЎОаОўОЎОф ОћОљОдОЋОеОћ ОЉОъОбОеОЏОф.
U, ОљОаОеОњОЎОЎОф ОћОњОЋОЉОћ ОћОљОдОЋОеОћ ОЉОъОбОеОЏОф ОћОЎОљ:

ОцОЋОаОДОдОЎОЎОф ОћОюОњОеОљОаОќ' L ОЕОю ОћОъОбОеОЏОф ОћОЎОљ:
 ;
<ОаОЌОЕОЉ ОбОфОћ ОљОф ОъОЕОЋОЋОљОф ОљОЋОЎОюОе-ОюОњОеОљОаОќ' ОюОцОЎ ОћОќОЋОЋОЎОф
;
<ОаОЌОЕОЉ ОбОфОћ ОљОф ОъОЕОЋОЋОљОф ОљОЋОЎОюОе-ОюОњОеОљОаОќ' ОюОцОЎ ОћОќОЋОЋОЎОф  :
:
 ОюОљОЌОе ОЌОЎОЕОЋОЉ ОћОаОњОќОеОЋОф ОћОЌОюОДОЎОЋОф ОЉОЏОю ОљОњОБ ОъОфОДОЉОюОф ОћОъОЕОЋОЋОљОћ:
ОюОљОЌОе ОЌОЎОЕОЋОЉ ОћОаОњОќОеОЋОф ОћОЌОюОДОЎОЋОф ОЉОЏОю ОљОњОБ ОъОфОДОЉОюОф ОћОъОЕОЋОЋОљОћ:


ОЉОљОЋОфОћ ОдОЋОеОћ, ОъОЌОЎОЕОЋОЉ ОъОЕОЋОЋОљОф ОљОЋОЎОюОе-ОюОњОеОљОаОќ' ОюОцОЎ ОћОќОЋОЋОЎОф  ОъОфОДОЉОюОф ОћОъОЕОЋОЋОљОћ:
ОъОфОДОЉОюОф ОћОъОЕОЋОЋОљОћ:


ОюОљОЌОе ОДОЎОеОЋОЉ ОюОќОЋОЋОЎОф ОДОўОаОЋОф ОЋОљОеОњОЋОЪ ОћОъОЕОЋОЋОљОЋОф, ОъОДОЉОюОЎОЮ Оъ-(I):

ОћОбОеОћ: ОъОЕОъОбОЋОф ОћОАОЎОъОЋОаОЎОЮ ОюОъОЕОЋОЋОљОЋОф (n,k) ОћОЋОљ: ОћОъОЕОЋОЋОљОћ Оћ-k ОбОЉОЋОе n ОъОфОаОЊОЎОЮ ОдОъОЋОЊОЎОЮ.
Оъ-(II) ОъОДОЉОюОЎОЮ:

ОаОЎОфОЋОЌ ОъОфОъОўОЎ ОбОЉОЋОе ОЕОюОЋОЕОћ ОъОфОаОЊОЎОЮ ОдОъОЋОЊОЎОЮ

ОъОЌОЎОЕОЋОЉ ОъОЕОЋОЋОљОЋОф ОљОЋОЎОюОе ОюОњОеОљОаОќ' ОЉОдОЋОеОћ ОќОћОћ ОюОќОЋ ОЕОцОЋОеОўОћ ОюОбОЎОю, ОДОЎОеОЋОЉ ОюОќОЋОЋОЎОЋОф ОДОўОаОЋОф, ОЋОљОеОњОЋОЪ ОћОъОЕОЋОЋОљОЋОф ОъОфОДОЉОюОЋОф ОћОъОЕОЋОЋОљОћ ОћОЉОљОЋОф:



ОћОЏОюОюОћ Ою-N ОъОфОаОЊОЎОЮ ОдОъОЋОЊОЎОЮ
ОЉОбОќОеОф ОЕОЕ ОћОъОЕОЋОЋОљОЋОф ОЕОцОЋОфОЌОЋ ОюОбОЎОю, ОаОаОАОЌ ОбОфОћ ОаОЋОАОЌОћ ОЏОюОюОЎОф ОбОЉОЋОе ОъОАОцОе (k) ОЕОю ОъОфОаОЊ ОЉОъОўОЋОўОюОф ОЉОбОюОф N ОъОфОаОЊОЎОЮ:

ОЏОљОЕОе:  ОћОЎОљ ОћОќОЋОЋОЎОф Оћ-i ОъОюОъОбОюОћ
ОћОЎОљ ОћОќОЋОЋОЎОф Оћ-i ОъОюОъОбОюОћ
ОћОбОеОћ: ОљОЮ k=N ОћОљОЎОЉОе ОћОљОЌОеОЋОЪ ОљОЎОаОЋ ОъОЋОцОЎОб, ОъОЕОЋОЮ ОЕОћОАОЏОЋОЮ Оъ-N+1 ОбОЊ N ОћОЋОљ ОАОЏОЋОЮ ОеОЎОД.
ОеОљОЋ ОњОЮ
ОДОЎОЕОЋОеОЎОЮ ОЌОЎОдОЋОаОЎОЎОЮ






