![]() Ш§Щ„ШҜЩҠЩҶШ§ШөЩҲШұ Ш§Щ„Щ…ШӯШёЩҲШё ШЈЩҲ Ш§Щ„ШіШ№ЩҠШҜ :ЩғШ§ЩҶ ШЈЩҲЩ„ ШҜЩҠЩҶШ§ШөЩҲШұ ЩҠШӘШӯШұЩғ ЩҲШӯШҜЩҮ ЩҒЩҠ ЩҲШ§Щ„ШӘ ШҜЩҠШІЩҶЩҠ ЩҒЩҠ Ш№Ш§Щ… 2005
Ш§Щ„ШҜЩҠЩҶШ§ШөЩҲШұ Ш§Щ„Щ…ШӯШёЩҲШё ШЈЩҲ Ш§Щ„ШіШ№ЩҠШҜ :ЩғШ§ЩҶ ШЈЩҲЩ„ ШҜЩҠЩҶШ§ШөЩҲШұ ЩҠШӘШӯШұЩғ ЩҲШӯШҜЩҮ ЩҒЩҠ ЩҲШ§Щ„ШӘ ШҜЩҠШІЩҶЩҠ ЩҒЩҠ Ш№Ш§Щ… 2005
 ШәШұЩҒШ© Ш§Щ„Щ…ШіШӯЩҲШұ ШӘЩҠЩғЩҠ
ШәШұЩҒШ© Ш§Щ„Щ…ШіШӯЩҲШұ ШӘЩҠЩғЩҠ
Ш§Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі ЩҮЩҲ Щ…Ш¬Ш§Щ„ Щ…ШӘШ№ШҜШҜ Ш§Щ„ШӘШ®ШөШөШ§ШӘ ЩҠШҜЩ…Ш¬ ШЁЩҠЩҶ Ш§Щ„ШӘШҙШұЩҠШӯШҢ Ш§Щ„ШұЩҲШЁЩҲШӘШ§ШӘШҢ Ш№Щ„Щ… Ш§Щ„Щ…ЩҠЩғШ§ЩҶЩҠЩғ ЩҲШ§Щ„ШӯШұЩғШ©ШҢ ЩҲЩҒЩҶ ШӘШӯШұЩҠЩғ Ш§Щ„ШҜЩ…Щү Щ…Щ…Ш§ ШЈШҜЩү ШҘЩ„Щү ШҘЩҶШӘШ§Ш¬ Ш§Щ„ШұШіЩҲЩ… Ш§Щ„Щ…ШӘШӯШұЩғШ© Ш§Щ„ЩҶШ§ШЁШ¶Ш© ШЁШ§Щ„ШӯЩҠШ§Ш©.[1][2]
Ш§Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі ШЈЩҲ ШҘЩ„ЩғШӘШұЩҲЩҶЩҠШ§ШӘ Ш§Щ„ШӘШӯШұЩҠЩғ ЩҠШҙЩҠШұ ШҘЩ„Щү Ш§ШіШӘШ®ШҜШ§Щ… Ш§Щ„ШЈШ¬ЩҮШІШ© Ш§Щ„ШұЩҲШЁЩҲШӘЩҠШ© ШЈЩҲ Ш§Щ„ШұЩҲШЁЩҲШӘШ§ШӘ Щ„Щ…ШӯШ§ЩғШ§Ш© Ш§Щ„ШҘЩҶШіШ§ЩҶ ШЈЩҲ Ш§Щ„ШӯЩҠЩҲШ§ЩҶ ШЈЩҲ ШҘШ¶Ш§ЩҒШ© Ш®ШөШ§ШҰШө ШӯЩҠЩҲЩҠШ© Щ„Щ„Ш¬Щ…Ш§ШҜШ§ШӘ.[3][4] ЩҠШөЩ…Щ… Ш§Щ„ШұЩҲШЁЩҲШӘ Щ„ЩҠЩғЩҲЩҶ ШӘЩӮЩ„ЩҠШҜШ§Щ‘ Щ…ЩӮЩҶШ№Ш§ЩӢ ЩҲЩ…Щ…Ш§Ш«Щ„Ш§ЩҺ Щ„Щ„ШҘЩҶШіШ§ЩҶ ЩҲЩҠШіЩ…Щү ЩҮШ°Ш§ Ш§Щ„ШӘЩӮЩ„ЩҠШҜ ШЁШ§Щ„ШұЩҲШЁЩҲШӘ (ШЈЩҲ Ш§Щ„ШЈЩҶШҜШұЩҲЩҠШҜ).[5][6][7] Ш§Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі Ш§Щ„ШӯШҜЩҠШ«Ш© ЩӮШҜ ШЈЩҲШ¬ШҜШӘ ШӘШ·ШЁЩҠЩӮШ§ШӘ ЩҲШ§ШіШ№Ш© ЩҒЩҠ Щ…Ш¬Ш§Щ„ Ш§Щ„Щ…ШӨШ«ШұШ§ШӘ Ш§Щ„Ш®Ш§ШөШ© Ш§Щ„ШӘЩҠ ШӘШ№ЩҶЩү ШЁШ§Щ„ШЈЩҒЩ„Ш§Щ… ЩҲЩ…ШҜЩҶ Ш§Щ„ШӘШұЩҒЩҠЩҮ ЩҲШ§Щ„ШӘШіЩ„ЩҠШ©ШҢ ЩҲЩӮШҜ Ш№ШұЩҒШӘ Щ…ЩҶШ° ШЁШҜШ§ЩҠШ§ШӘЩҮШ§ ШЁШЈЩҶЩҮШ§ ЩғШ§ЩҶШӘ Щ…ШҙЩҮШҜШ§Щ‘ ШЈШіШ§ШіЩҠШ§ЩӢ ЩҒЩҠ Ш§Щ„ШӘШұЩҒЩҠЩҮ.
Ш§Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі ЩҮЩҲ Щ…Ш¬Ш§Щ„ Щ…ШӘШ№ШҜШҜ Ш§Щ„ШӘШ®ШөШөШ§ШӘ ЩҠШҜЩ…Ш¬ ШЁЩҠЩҶ Ш§Щ„ШӘШҙШұЩҠШӯШҢ Ш§Щ„ШұЩҲШЁЩҲШӘШ§ШӘШҢ Ш№Щ„Щ… Ш§Щ„Щ…ЩҠЩғШ§ЩҶЩҠЩғ ЩҲШ§Щ„ШӯШұЩғШ©ШҢ ЩҲЩҒЩҶ ШӘШӯШұЩҠЩғ Ш§Щ„ШҜЩ…Щү Щ…Щ…Ш§ ШЈШҜЩү ШҘЩ„Щү ШҘЩҶШӘШ§Ш¬ Ш§Щ„ШұШіЩҲЩ… Ш§Щ„Щ…ШӘШӯШұЩғШ© Ш§Щ„ЩҶШ§ШЁШ¶Ш© ШЁШ§Щ„ШӯЩҠШ§Ш©.[1][2] ШҘЩҶ Ш§Щ„ШЁЩҶЩү ЩҲШ§Щ„ШЈШҙЩғШ§Щ„ Ш§Щ„Щ…ШөЩҶЩҲШ№Ш© ШЁШ§ШіШӘШ®ШҜШ§Щ… Ш§Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі ШәШ§Щ„ШЁШ§ЩҺ ШӘЩғЩҲЩҶ Щ…ШҜШ№Щ…Ш© ШЁШ№Щ„Щ… Ш§Щ„Ш®ШөШ§ШҰШө Ш§Щ„Щ…ЩҠЩғШ§ЩҶЩҠЩғЩҠШ© ЩҲШ№Щ„Щ… Ш§Щ„ШіЩҲШ§ШҰЩ„ Ш§Щ„Щ…ШӘШӯШұЩғШ© ЩҲ/ШЈЩҲ Ш§Щ„ЩҲШіШ§ШҰЩ„ Ш§Щ„ЩғЩҮШұШЁШ§ШҰЩҠШ©ШҢ ЩҲЩҠЩ…ЩғЩҶ ШӘЩҶЩҒЩҠШ°ЩҮШ§ ЩҲШ§Щ„ШӘШӯЩғЩ… ШЁЩҮШ§ ШЁЩҲШіШ§Ш·Ш© Ш§Щ„ШӯШ§ШіЩҲШЁ ШЈЩҲ ШЁЩҲШіШ§Ш·Ш© Ш§Щ„ШҘЩҶШіШ§ЩҶШҢ ШЁЩ…Ш§ ЩҒЩҠЩҮШ§ Ш§Щ„ШӘШҙШәЩҠЩ„ Ш№ЩҶ ШЁШ№ШҜ. ШӘШіШӘШ®ШҜЩ… ШәШ§Щ„ШЁШ§ЩӢ Ш§Щ„Щ…ШӯШұЩғШ§ШӘ Ш§Щ„Ш®Ш§ШөШ© ШЁШ§Щ„ШӘШӯШұЩҠЩғ Щ„ШӘЩ…Ш«ЩҠЩ„ ШӯШұЩғШ§ШӘ Ш§Щ„Ш№Ш¶Щ„Ш§ШӘ ЩҲШҘЩҶШҙШ§ШЎ ШӯШұЩғШ© ШӯЩӮЩҠЩӮЩҠШ© ЩҒЩҠ Ш§Щ„ШЈШ·ШұШ§ЩҒ. ШӘШәШ·Щү Ш§Щ„ШЁЩҶЩү ЩҲШ§Щ„ШЈШҙЩғШ§Щ„ ШЁЩӮШҙЩҲШұ Ш®Ш§ШұШ¬ЩҠШ© ЩҲШ¬Щ„ЩҲШҜ Щ…ШұЩҶШ© Щ…ШөЩҶЩҲШ№Ш© Щ…ЩҶ Щ…ЩҲШ§ШҜ ШЁЩ„Ш§ШіШӘЩҠЩғЩҠШ© ШөЩ„ШЁШ© ЩҲЩ„ЩҠЩҶШ©ШҢ ЩҲЩҠШӘЩ… ШҘЩҶЩҮШ§ШӨЩҮШ§ ШЁШӘЩҒШ§ШөЩҠЩ„ ШҜЩӮЩҠЩӮШ© Щ…Ш«Щ„ Ш§Щ„ШЈЩ„ЩҲШ§ЩҶ ЩҲШ§Щ„ШҙШ№Шұ ЩҲШ§Щ„ШұЩҠШҙ ЩҲШӘЩҒШ§ШөЩҠЩ„ ШЈШ®ШұЩү Щ„Ш¬Ш№Щ„ Ш§Щ„Щ…Ш¬ШіЩ… ЩҠШЁШҜЩҲ ЩҲШ§ЩӮШ№ЩҠШ§ЩҺ ШЈЩғШ«Шұ.
ШіШЁШЁ Ш§Щ„ШӘШіЩ…ЩҠШ©
Ш§Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі ЩҮЩҲ ШҜЩ…Ш¬ ШЁЩҠЩҶ ЩғЩ„Щ…ШӘЩҠ animate (ШЈЩҶЩҠЩ…Ш§ЩҠШӘ) ШЁШ§Щ„ШҘЩҶШ¬Щ„ЩҠШІЩҠШ© ЩҲШӘШ№ЩҶЩҠ Ш§Щ„ШӘШӯШұЩҠЩғШҢ ЩҲЩғЩ„Щ…Ш© ШҘЩ„ЩғШӘШұЩҲЩҶЩҠШ§ШӘ (ШҘЩ„ЩғШӘШұЩҲЩҶЩғШі) ЩҲШӘШ№ЩҶЩҠ Ш§Щ„ШҘЩ„ЩғШӘШұЩҲЩҶЩҠШ§ШӘ.[8]
Ш§Щ„Щ…ШөШ·Щ„Шӯ ШҘЩ„ЩғШӘШұЩҲЩҶЩҠШ§ШӘ ШӯШұЩғШ© Ш§Щ„ШөЩҲШӘ ШӘЩ…ШӘ ШөЩҠШ§ШәШӘЩҮ ШЁЩҲШ§ШіШ·Ш© ЩҲШ§Щ„ШӘ ШҜЩҠШІЩҶЩҠ Ш№ЩҶШҜЩ…Ш§ ШЁШҜШЈ ШЁШ§Ш®ШӘШұШ§Ш№ Ш§Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі Щ„Щ„ШӘШұЩҒЩҠЩҮ ЩҲШ§Щ„ШЈЩҒЩ„Ш§Щ….
Ш§Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі Ш§Щ„ШөЩҲШӘЩҠШ© Щ„Ш§ ШӘЩҲШ¬ШҜ ЩҒШұЩӮШ§ЩҺ ШЁЩҠЩҶ Ш§Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі ЩҲШ§Щ„ШұЩҲШЁЩҲШӘШ§ШӘ.
Ш§Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі Ш§Щ„ШӘЩ„ЩӮШ§ШҰЩҠШ© ШӘЩ…ШӘ ШӘШіЩ…ЩҠШӘЩҮШ§ ШЁЩҲШ§ШіШ·Ш© ЩҒШұЩҠЩӮ ЩҲШ§Щ„ШӘ ШҜЩҠШІЩҶЩҠШҢ ЩҲЩҮЩҠ ШӘШөЩҒ Ш§Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі Ш§Щ„ШЈЩғШ«Шұ ШӘШ№ЩӮЩҠШҜШ§ЩҺ ШЁШ§ШіШӘШ®ШҜШ§Щ… Ш§Щ„ЩғШ§Щ…ЩҠШұШ§ШӘ ЩҲШ§Щ„ШӯШіШ§ШіШ§ШӘ Ш§Щ„Щ…Ш№ЩӮШҜШ© Щ„ШӘШӯЩ„ЩҠЩ„ Ш§Щ„Щ…Ш№Щ„ЩҲЩ…Ш§ШӘ Ш§Щ„Щ…ЩҲШ¬ЩҲШҜШ© ЩҒЩҠ ШЁЩҠШҰШ© Ш§Щ„Щ…Ш¬ШіЩ… ЩҲШҘШ№Ш·Ш§ШЎ Ш§ШіШӘШ¬Ш§ШЁШ© ШЁЩҶШ§ШЎШ§ЩҺ Щ„Щ„Щ…ШӯЩҒШІ Ш§Щ„Ш®Ш§ШұШ¬ЩҠ.[9]
Ш§Щ„Ш®Ш· Ш§Щ„ШІЩ…ЩҶЩҠ
1220-1240: Щ…ШӯЩҒШёШ© ЩҒЩҠЩ„Ш§ШұШҜ ШҜЩҠ ЩҮЩҲЩҶЩғЩҲШұШӘ: ЩҠШөЩҲШұ ШўЩ„ЩҠШ© Щ…ЩҠШІШ§ЩҶ Щ…ШЁЩғШұШ© ЩҒЩҠ ШұШіЩ… ШЁШ№ЩҶЩҲШ§ЩҶ ЩғЩҠЩҒЩҠШ© Ш¬Ш№Щ„ Щ…Щ„Ш§ЩғШ§ ШӯЩҒШ§Шё Щ…ШҙЩҠШұШ§ ШЁШҘШөШЁШ№ЩҮ ЩҶШӯЩҲ Ш§Щ„ШҙЩ…Ші ЩҲШҘЩҶШіШ§ЩҶ Щ…ЩҶ Ш§Щ„Ш·ЩҠЩҲШұШҢ Щ…Ш№ ШЈШ¬ЩҶШӯШ© ШөЩҲШӘЩҮШ§.
1515:Щ„ЩҠЩҲЩҶШ§ШұШҜЩҲ ШҜШ§ ЩҒЩҠЩҶШҙЩҠ ШөЩ…Щ… ЩҲШЁЩҶЩү ШЈШіШҜШ§ЩҺ ЩҠШҙШәЩ„ Ш°Ш§ШӘЩҠШ§ЩӢ.[10]
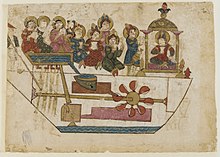 Щ„Ш№ШЁШ© Ш§Щ„Ш¬ШІШұЩҠ Ш§Щ„Щ…ЩҲШіЩҠЩӮЩҠШ© ЩҲЩ„Ш№ШЁШ© Ш§Щ„ЩӮШ§ШұШЁ
Щ„Ш№ШЁШ© Ш§Щ„Ш¬ШІШұЩҠ Ш§Щ„Щ…ЩҲШіЩҠЩӮЩҠШ© ЩҲЩ„Ш№ШЁШ© Ш§Щ„ЩӮШ§ШұШЁ
1738: ШЁЩҶШ§ШЎ Ш§Щ„ШўЩ„ЩҠ ЩҲШЁШҜШЈ ЩҒЩҠ ШәШұЩҲЩҶЩҲШЁЩ„ШҢ ЩҒШұЩҶШіШ§ ШЁЩҲШ§ШіШ·Ш© Ш¬Ш§Щғ ШҜЩҠ ЩҒЩҲЩғШ§ЩҶШіЩҲЩҶШҢ Щ„Ш§Ш№ШЁ Ш§Щ„ЩҶШ§ЩҠ Ш§Щ„ШЈЩҲЩ„ ЩҠЩ…ЩғЩҶ ШЈЩҶ ЩҠШ№ШІЩҒ Ш§Ш«ЩҶШ§ Ш№ШҙШұ ШЈШәЩҶЩҠШ© -Щ„Ш§Ш№ШЁ Ш§Щ„ЩҶШ§ЩҠШҢ Щ…ШӘШЁЩҲШ№Ш§ ШЁЩ„Ш§Ш№ШЁ Ш№Щ„Щү Ш§Щ„ЩҶШ§ЩҠ ЩҲШ§Щ„Ш·ШЁЩ„ ШЈЩҲ Ш§Щ„ШҜЩҒ- Щ„Ш§Ш№ШЁ Ш§Щ„ШҜЩҒШҢ ЩҠШӘШ¶Щ…ЩҶ Щ…Ш№ Ш§Щ„ШӯШұЩғШ© / Ш§Щ„ЩҲЩӮЩҲЩӮШ© / Ш¶ШұШЁ / Ш§ЩғЩ„ Ш§Щ„ШЁШ· - Ш§Щ„ШЁШ·Ш© Ш§Щ„ЩҮШ§Ш¶Щ…Ш©.[11]
1770: ШЁЩҠШұ Ш¬Ш§ЩғЩҠШӘ ШҜШұЩҲШҢ ЩҲШ§ШЁЩҶЩҮ ЩҮЩҶШұЩҠ Щ„ЩҲЩҠШі Ш¬Ш§ЩғЩҠШӘ ШҜШұЩҲШҢ ЩғЩ„Ш§ЩҮЩ…Ш§ ШөШ§ЩҶШ№Ш§ ШіШ§Ш№Ш§ШӘ ШіЩҲЩҠШіШұЩҠШ©ШҢ ШЁШҜШЎШ§ ШЁШҘШ¬ШұШ§ШЎ Ш§Щ„ШўЩ„ЩҠШ§ШӘ Щ„Щ…Щ„ЩҲЩғ ШЈЩҲШұЩҲШЁШ§.ЩҲШЁЩ…Ш¬ШұШҜ Ш§Щ„Ш§ЩҶШӘЩҮШ§ШЎШҢ ЩҒШҘЩҶЩҮ ШӘЩ… Ш§Ш®ШӘШұШ§Ш№ Ш«Щ„Ш§Ш« ШҜЩ…ЩүШҢ ЩҲЩғШ§ЩҶШӘ ШҜЩ…ЩҠШ© ЩҲШ§ШӯШҜШ© ЩӮШ§ШҜШұШ© Ш№Щ„Щү Ш§Щ„ЩғШӘШ§ШЁШ©ШҢ ЩҲЩғШ§ЩҶШӘ ЩҲШ§ШӯШҜШ© ЩӮШ§ШҜШұШ© Ш№Щ„Щү Ш№ШІЩҒ Ш§Щ„Щ…ЩҲШіЩҠЩӮЩүШҢ ЩҲШҜЩ…ЩҠШ© Ш«Ш§Щ„Ш«Ш© ЩҠЩ…ЩғЩҶЩҮШ§ ШұШіЩ… Ш§Щ„ШөЩҲШұ.[12]
1801: Ш¬ЩҲШІЩҠЩҒ Ш¬Ш§ЩғШ§Шұ ШЁЩҶЩү Ш§Щ„ЩҶЩҲЩ„ Ш§Щ„ШӘЩҠ ЩҠШӘЩ… Ш§Щ„ШӘШӯЩғЩ… ШЁЩҮ ШЁШҙЩғЩ„ Щ…ШіШӘЩӮЩ„ Щ…Ш№ Ш§Щ„ШЁШ·Ш§ЩӮШ§ШӘ Ш§Щ„Щ…Ш«ЩӮШЁШ©.
1939: ШіШЁШ§ШұЩғЩҲШҢ Ш§Щ„ШұЩҲШЁЩҲШӘ Ш§Щ„ЩғЩ„ШЁШҢ Ш§Щ„ШӯЩҠЩҲШ§ЩҶ Ш§Щ„ШЈЩ„ЩҠЩҒ Ш§Щ„Ш®Ш§Шө ШЁШҘЩ„ЩғШӘШұЩҲ. ЩҠЩӮШҜЩ… Ш№ШұШ¶Ш§ЩӢ ШӘЩӮШҜЩҠЩ…ЩҠШ§ЩӢ ШЈЩ…Ш§Щ… Ш§Щ„Ш№Ш§Щ…Ш©ШҢ Щ„ЩғЩҶ ШіШЁШ§ШұЩғЩҲ Ш№Щ„Щү Ш№ЩғШі ШӘШөЩҲЩҠШұШ§ШӘ Ш§Щ„ШұЩҲШЁЩҲШӘШ§ШӘ ЩҒЩҠ Ш°Щ„Щғ Ш§Щ„ЩҲЩӮШӘШҢ Щ…Ш«Щ‘Щ„ ЩғШ§ШҰЩҶШ§ЩӢ ШӯЩҠШ§ЩӢШҢ ЩҲЩҮЩғШ°Ш§ ЩғШ§ЩҶ ШЈЩҲЩ„ Щ…Ш¬ШіЩ… ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩҠЩғ Щ…ШӘШӯШұЩғ ЩҒЩҠ Ш§Щ„Ш№ШөШұ Ш§Щ„ШӯШҜЩҠШ«.[13][14]
1961: ЩҮШ§ЩҠЩҶШұЩҠШҙ ШҘШұЩҶШіШӘ ШөЩҶШ№ M H-1ШҢ Ш§Щ„ЩҠШҜ Ш§Щ„Щ…ЩҠЩғШ§ЩҶЩҠЩғЩҠШ© Ш§Щ„ШӘЩҠ ШӘШҜШ§Шұ Ш№ЩҶ Ш·ШұЩҠЩӮ Ш§Щ„ШӯШ§ШіЩҲШЁ.[15]
1961: ЩҲШ§Щ„ШӘ ШҜЩҠШІЩҶЩҠ ШЁШҜШЈШӘ ШЁШөЩғ Ш§Щ„Щ…ЩҠЩғШ§ШӘШұЩҲЩҶЩғШі Ш§Щ„ШіЩ…Ш№ЩҠШ©ШҢ ЩҲШЁШҜШЈШӘ ШЁШӘШ·ЩҲЩҠШұ ШӘЩғЩҶЩҲЩ„ЩҲШ¬ЩҠШ§ Ш§Щ„Щ…ЩҠЩғШ§ШӘШұЩҲЩҶЩғШі Ш§Щ„ШӯШҜЩҠШ«Ш©.[16]
1963: ШЈЩҲЩ„ ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі ЩғШ§Щ…Щ„Ш©ШҢ Ш·ЩҲШұШӘ ШЁЩҲШ§ШіШ·Ш© ЩҲШ§Щ„ШӘ ШҜЩҠШІЩҶЩҠ, ЩҲЩғШ§ЩҶШӘ Ш·ЩҠЩҲШұ ШӘЩҠЩғЩҠ Ш§Щ„ШіШ§ШӯШұШ© ЩҒЩҠ ШҜЩҠШІЩҶЩҠ Щ„Ш§ЩҶШҜ.
1964: ЩҒЩҠ ЩҒЩ„Щ… Щ…Ш§ШұЩҠ ШЁЩҲШЁЩҶШІШҢ Ш·ЩҠЩҲШұ Ш§Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі ЩғШ§ЩҶШӘ ШЈЩҲЩ„ Щ…Ш¬ШіЩ…Ш§ШӘ ЩҠШӘЩ… Ш№ШұШ¶ЩҮШ§ ЩҒЩҠ Ш№ШұШ¶ ШіЩҠЩҶЩ…Ш§ШҰЩҠ.
1965: ШЈЩҲЩ„ Щ…Ш¬ШіЩ… ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі Щ„Ш¬ШіЩ… Ш§Щ„ШҘЩҶШіШ§ЩҶ ЩғШ§ЩҶ ЩҠЩ…Ш«Щ„ ШЈШЁШұШ§ЩҮШ§Щ… Щ„ЩҶЩғЩҲЩ„ЩҶШҢ ЩҲШөЩҶШ№ ШЁЩҲШ§ШіШ·Ш© ШҜЩҠШІЩҶЩҠ.
1968: ШөЩҶШ№ШӘ ШЈЩҲЩ„ ШҙШ®ШөЩҠШ© ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі ЩҒЩҠ Щ…Ш·Ш№Щ…ШҢ ШіЩ…Щ‘ЩҠ ШЁЩ…Ш§ШұЩҠЩҲ Ш§Щ„Ш°ЩҮШЁЩҠШҢ ЩҲШөЩҶШ№ ШЁЩҲШ§ШіШ·Ш© ЩҒШұЩҠЩӮ ЩҠШіЩ…Щү ШЁШӘЩҠЩ… ШЁЩ„ШӘ Team Built.
1977: Щ…Ш·Ш№Щ… ШӘШҙШ§ЩғЩҠ ШӘШҙЩҠШІ Chuck E. Cheese's Ш§ЩҒШӘШӘШӯ ШЈШЁЩҲШ§ШЁЩҮ ЩғШЈЩҲЩ„ Щ…Ш·Ш№Щ… ЩҠШ¶Щ… Ш§Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі ЩғЩҲШіЩҠЩ„Ш© Ш¬Ш°ШЁ Щ„Щ„ШІЩҲШ§Шұ.
1980: Щ…Ш·Ш№Щ… ШЁЩҠШӘШІШ§ ЩҠШіЩ…Щү ШҙЩҲ-ШЁЩҠШІ ЩҠЩҒШӘШӘШӯ "The Rock-afire Explosion" ЩҲЩҮЩҠ ЩҒШұЩӮШ© ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі.
 ЩҲШ¬ЩҮ Щ…ЩҶ Ш§Щ„ШіШ§Ш№Ш© Ш§Щ„ЩҒЩ„ЩғЩҠШ©ШҢ ЩҒЩҠ ШіШ§ШӯШ© Ш§Щ„ШЁЩ„ШҜШ© Ш§Щ„ЩӮШҜЩҠЩ…Ш©
ЩҲШ¬ЩҮ Щ…ЩҶ Ш§Щ„ШіШ§Ш№Ш© Ш§Щ„ЩҒЩ„ЩғЩҠШ©ШҢ ЩҒЩҠ ШіШ§ШӯШ© Ш§Щ„ШЁЩ„ШҜШ© Ш§Щ„ЩӮШҜЩҠЩ…Ш©
1982: ШЁЩҶ ЩҒШұШ§ЩҶЩғЩ„ЩҠЩҶ ЩҮЩҲ ШЈЩҲЩ„ ШҙШ®ШөЩҠШ© Щ…ШӘШӯШұЩғШ© ЩӮШ§ШҜШұШ© Ш№Щ„Щү Ш§Щ„Щ…ШҙЩҠ Ш№Щ„Щү Щ…Ш¬Щ…ЩҲШ№Ш© Щ…ЩҶ Ш§Щ„ШіЩ„Ш§Щ„Щ….[17]
1989: ШӘЩ… ШӘШ·ЩҲЩҠШұ ШЈЩҲЩ„ Щ…ШӘШӯШұЩғ A-100 ЩҒЩҠ Ш§ШіШӘЩҲШҜЩҠЩҲЩҮШ§ШӘ ШҜЩҠШІЩҶЩҠ MGM Щ„ШӘЩ…Ш«ЩҠЩ„ Ш§Щ„ШіШ§ШӯШұШ© Ш§Щ„ШҙШұЩҠШұШ© Ш§Щ„Ш®Ш§ШөШ© ШЁШ§Щ„ШәШұШЁ.
1993: ШЈЩғШЁШұ ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғ Щ…ШӘШӯШұЩғ Ш№Щ„Щү Ш§Щ„ШҘШ·Щ„Ш§ЩӮ ЩҮЩҲ ШӘЩҠ-ШұЩҠЩғШі Щ„ЩҒЩҠЩ„Щ… Ш§Щ„ШӯШҜЩҠЩӮШ© Ш§Щ„Ш¬ЩҲШұШ§ШіЩҠШ©.
1998: ШҘЩ„ЩғШӘШұЩҲЩҶЩҠШ§ШӘ Ш§Щ„ЩҶЩ…Шұ ЩҠШЁШҜШЈ ШЁЩҠШ№ FurbyШҢ ШӯЩҠЩҲШ§ЩҶ ШЈЩ„ЩҠЩҒ Щ…ШӘШӯШұЩғ Щ…Ш№ ШЈЩғШ«Шұ Щ…ЩҶ 800 Щ…ЩҶ Ш§Щ„Ш№ШЁШ§ШұШ§ШӘ Ш§Щ„ШҘЩҶШ¬Щ„ЩҠШІЩҠШ© Щ…Ш№ Ш§Щ„ЩӮШҜШұШ© Ш№Щ„Щү Ш§Щ„ШӘЩҒШ§Ш№Щ„ Щ…Ш№ ШЁЩҠШҰШӘЩҮ. ЩҒЩҠШұЩҶЩҲЩҶ ЩҮЩҠЩ„ШІШҢ ШҘЩ„ЩҠЩҶЩҲЩҠ.
1999: ШҙШұЩғШ© ШіЩҲЩҶЩҠ Ш§Щ„Ш№Щ…Щ„Ш§ЩӮШ© ШӘШ·Щ„ЩӮ ШЈЩҠШЁЩҲ AIBOШҢ Ш§Щ„ШӯЩҠЩҲШ§ЩҶ Ш§Щ„ШЈЩ„ЩҠЩҒ Ш§Щ„Ш®Ш§Шө ШЁШ§Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі.Ш§Щ„ЩҠШ§ШЁШ§ЩҶШҢ Ш·ЩҲЩғЩҠЩҲ.
2008: Ш§Щ„ШіЩҠШҜ ШұШЈШі Ш§Щ„ШЁШ·Ш§Ш·Ші ЩҒЩҠ ЩҒЩҠЩ„Щ… ЩӮШөШ© Щ„Ш№ШЁШ© ЩҠШӘЩ…ЩҠШІШЁШӯШұЩғШ© Ш§Щ„ШҙЩҒШ§ЩҮ Щ…Ш№ Щ…Ш¬Щ…ЩҲШ№Ш© Щ…ШӘЩҒЩҲЩӮШ© Щ…ЩҶ Ш§Щ„ШӯШұЩғШ§ШӘ Ш№ЩҶ ШЈЩҠ ШҙШ®ШөЩҠШ© Щ…ШӘШӯШұЩғ ШЈШ®ШұЩү ЩҒЩҠ Ш§Щ„ШіШ§ШЁЩӮШҢ ШіШӘЩҲШҜЩҠЩҲЩҮШ§ШӘ ШҜЩҠШІЩҶЩҠ ЩҮЩҲЩ„ЩҠЩҲЩҲШҜ.[18]
2008-2009: ШӘШұЩӮЩҠШ© Щ…Ш¬ШіЩ… ШЈШЁШұШ§ЩҮШ§Щ… Щ„ЩҶЩғЩҲЩ„ЩҶ Щ„ЩғЩҠ ЩҠШҙЩ…Щ„ ШӘЩғЩҶЩҲЩ„ЩҲШ¬ЩҠШ§ Ш§Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі Ш§Щ„ШӘЩ„ЩӮШ§ШҰЩҠШ©ШҢ ЩӮШ§Ш№Ш© Ш§Щ„ШұШӨШіШ§ШЎ.
2009: ШҜЩҠШІЩҶЩҠ ШӘШ·ЩҲШұ В«ШЈЩҲШӘЩҲВ»ШҢ ЩҲЩҮШ°Ш§ Ш§Щ„Щ…Ш¬ШіЩ… Ш§Щ„ШӘЩҒШ§Ш№Щ„ЩҠ Ш§Щ„ШЈЩҲЩ„ Ш§Щ„ШӘЩҠ ЩҠЩ…ЩғЩҶ ШЈЩҶ ЩҠШіЩ…Ш№ ЩҲЩҠШұЩү ЩҲЩҠШӯШі Ш§Щ„ШӯШұЩғШ§ШӘ Ш§Щ„ШӘЩҠ ШӘШӯШөЩ„ ШӯЩҲЩ„ЩҮ.
Ш§Щ„ШӘШ§ШұЩҠШ®
Ш§Щ„ШЈШөЩҲЩ„
ЩҒЩҠ Ш§Щ„ЩӮШұЩҶ Ш§Щ„Ш«Ш§Щ„Ш« ЩӮШЁЩ„ Ш§Щ„Щ…ЩҠЩ„Ш§ШҜ Ш§Щ„ЩғШ§ШӘШЁШ© Щ„ЩҠШІЩҠ ШӘШ№ШЁШұ Ш№ЩҶ Щ…ЩӮШ§ШЁЩ„Ш© ШЁЩҠЩҶ Ш§Щ„Щ…Щ„Щғ В«Щ…ЩҲ Ш§ЩҲЩҒ ШІЩҲВ» ЩҲЩ…Ш®ШӘШұШ№ ЩҠШіЩ…Щү ШЁВ«ЩҠШ§ЩҶ ШҙЩҠВ» Ш§Щ„Ш°ЩҠ ЩӮШҜЩ… Щ„Щ„Щ…Щ„Щғ Щ…Ш¬ШіЩ… ШҘЩҶШіШ§ЩҶ ШЁШ§Щ„ШӯШ¬Щ… Ш§Щ„Ш·ШЁЩҠШ№ЩҠ. ЩҲЩӮШҜ ЩҲШөЩҒШӘ ШЁШ§Щ„ШҙШ®ШөЩҠШ© ЩғЩ…Ш§ ЩғШ§ЩҶ ЩӮШ§ШҜШұШ§ Ш№Щ„Щү Ш§Щ„Щ…ШҙЩҠШҢ Ш§Щ„ШӘШҙЩғЩ„ ЩҲШ§Щ„ШәЩҶШ§ШЎШҢ ЩҲШ№ЩҶШҜЩ…Ш§ ЩҒЩғЩғШӘ Щ„ЩҲШӯШё ШЈЩҶЩҮШ§ ШӘШӘЩғЩҲЩҶ Щ…ЩҶ ШЈШ¬ЩҮШІШ© ШҜЩӮЩҠЩӮШ© ШӘШҙШұЩҠШӯЩҠШ§ЩҺ.
ЩҒЩҠ Ш§Щ„ЩӮШұЩҶ Ш§Щ„Ш®Ш§Щ…Ші ЩӮШЁЩ„ Ш§Щ„Щ…ЩҠЩ„Ш§ШҜ ЩҠШ№ШІЩү Ш§Щ„ЩҒЩҠЩ„ШіЩҲЩҒ Ш§Щ„Щ…ЩҲШІЩҠ ЩҲЩ„ЩҮ ШЁШ§ЩҶ Щ„ЩҲ Ш§Щ„Щ…Ш№Ш§ШөШұ Щ„Ш§Ш®ШӘШұШ§Ш№ Ш§Щ„Ш·ЩҠЩҲШұ Ш§Щ„Ш®ШҙШЁЩҠШ© Ш§Щ„Ш§ШөШ·ЩҶШ§Ш№ЩҠШ© (ШЈЩ…Ш§ЩҮ ЩҠЩҲШ§ЩҶ) Ш§Щ„ШӘЩҠ ЩҠЩ…ЩғЩҶ ШЈЩҶ ШӘШ·ЩҠШұ ШЁЩҶШ¬Ш§Шӯ ЩҒЩҠ ЩҮШ§ЩҶ ЩҒШ§ЩҠ ШІЩҠ. ЩҲЩҒЩҠ Ш№Ш§Щ… 1066ШҢ ШҙЩғЩ‘Щ„ Ш§Щ„Щ…Ш®ШӘШұШ№ Ш§Щ„ШөЩҠЩҶЩҠ ШіЩҲЩҶШә ШіЩҲ Ш§Щ„Щ…ЩҠШ§ЩҮ Ш№Щ„Щү Щ…ШҜШ§Шұ Ш§Щ„ШіШ§Ш№Ш© ЩҒЩҠ ШҙЩғЩ„ ШЁШұШ¬ ЩҲШ§Щ„ШӘЩҠ ШёЩҮШұШӘ Ш№Щ„Щү ШҙЩғЩ„ ШӘЩ…Ш§Ш«ЩҠЩ„ Щ…ЩҠЩғШ§ЩҶЩҠЩғЩҠШ©.
ЩҒЩҠ Ш№Ш§Щ… 1515, ШөЩ…Щ… Щ„ЩҠЩҲЩҶШ§ШұШҜЩҲ ШҜШ§ ЩҒЩҠЩҶШҙЩҠ ЩҲШЁЩҶЩү Ш§Щ„ШЁШ§ШұШҜЩҲЩҶ Ш§Щ„ШЈШіШҜШҢ ЩҲШ§ШӯШҜШ© Щ…ЩҶ ШЈЩӮШҜЩ… Ш§Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі. ЩҲЩӮШҜЩ… Ш§Щ„ШЈШіШҜ Ш§Щ„Щ…ЩҠЩғШ§ЩҶЩҠЩғЩҠШ© Ш¬ЩҲЩ„ЩҠШ§ЩҶЩҲ ШҜЩҠ Щ…ЩҠШҜЩҠШҙЩҠ ЩҒЩҠ ЩҒЩ„ЩҲШұЩҶШіШ§ Щ„ЩҒШұШ§ЩҶШіЩҲШ§ Ш§Щ„ШЈЩҲЩ„ Щ…Щ„Щғ ЩҒШұЩҶШіШ§ ЩғШұЩ…ШІ Щ„Щ„ШӘШӯШ§Щ„ЩҒ ШЁЩҠЩҶ ЩҒШұЩҶШіШ§ ЩҲЩҒЩ„ЩҲШұЩҶШіШ§. ШЈШ№ЩҠШҜ ШЁЩҶШ§ШЎ Ш§Щ„ШЁШ§ШұШҜЩҲЩҶ Ш§Щ„ШЈШіШҜ ЩҒЩҠ Ш№Ш§Щ… 2009 ЩҲЩҒЩӮШ§ Щ„ШӘЩҲШөЩҠЩҒ Ш§Щ„Щ…Ш№Ш§ШөШұШ© ЩҲШұШіЩҲЩ…Ш§ШӘ ШҜШ§ЩҒЩҶШҙЩҠ Ш§Щ„Ш®Ш§ШөШ©. ЩҲЩӮШЁЩ„ Ш°Щ„ЩғШҢ ЩғШ§ЩҶ ШҜШ§ ЩҒЩҠЩҶШҙЩҠ ЩӮШҜ ШөЩ…Щ… ЩҲШ№ШұШ¶ ЩҒШ§ШұШі Ш§Щ„Щ…ЩҠЩғШ§ЩҶЩҠЩғЩҠШ© ЩҒЩҠ Ш§ШӯШӘЩҒШ§Щ„ Щ„ЩҲШҜЩҲЩҒЩҠЩғЩҲ ШіЩҒЩҲШұШІШ§Щ„ШӘШ°ЩҠ Ш§ШіШӘШ¶Ш§ЩҒ ЩҒЩҠ Щ…ШӯЩғЩ…Ш© Щ…ЩҠЩ„Ш§ЩҶЩҲ ЩҒЩҠ Ш№Ш§Щ… 1495.ЩҲЩғШ§ЩҶ ШұЩҲШЁЩҲШӘШ§ЩӢ ЩӮШ§ШҜШұШ§ЩҺ Ш№Щ„Щү Ш§Щ„ЩӮЩҠШ§Щ… ЩҲШ§Щ„ЩӮШ№ЩҲШҜШҢ ЩҲЩҒШӘШӯ ЩӮЩҶШ§Ш№ЩҮ ЩҲШӘШӯШұЩҠЩғ ШіЩ„Ш§ШӯЩҮ. ШӘЩ… Ш§ЩғШӘШҙШ§ЩҒ Ш§Щ„ШұШіЩҲЩ… ЩҒЩҠ 1950 ЩҲШӘЩ… ШЁЩҶШ§ШЎ ЩҶШіШ®Ш© Ш·ШЁЩӮ Ш§Щ„ШЈШөЩ„ ЩҒЩҠ ЩҲЩӮШӘ Щ„Ш§ШӯЩӮ.
Ш§Щ„ШӘШ·ШЁЩҠЩӮШ§ШӘ Ш§Щ„Щ…ШЁЩғШұШ©
Ш§Щ„ШіШ§Ш№Ш§ШӘ
ШӘЩ… ШӘШөЩ…ЩҠЩ… Ш§Щ„ШіШ§Ш№Ш§ШӘ ЩҒЩҠ ЩҲЩӮШӘ Щ…ШЁЩғШұ ШЈЩҠШ¶Ш§Щ‘ ЩғШ§Щ„Щ…ШіШӘШ¬ШҜШ§ШӘ ЩҲШ§Щ„ЩҶШёШ§ШұШ§ШӘ Ш§Щ„ШӘЩҠ ШӘШҜЩ…Ш¬ Щ…Щ„Ш§Щ…Шӯ Ш§Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі ЩҒЩҠ ЩҲЩӮШӘ Щ…ШЁЩғШұ. ЩҲЩғШӘШЁ ЩҒЩҠЩ„Ш§ШұШҜ ШҜЩҠ ЩҮЩҲЩҶЩғЩҲШұШӘ ШӯШ§ЩҒШёШ© ЩҒЩҠЩ„Ш§ШұШҜ ШҜЩҠ ЩҮЩҲЩҶЩғЩҲШұШӘ Ш§Щ„Ш°ЩҠ ЩҠШөЩҲШұ ШўЩ„ЩҠШ© Щ…ЩҠШІШ§ЩҶ ЩҒЩҠ ШұШіЩ… ШЁШ№ЩҶЩҲШ§ЩҶ ЩғЩҠЩҒЩҠШ© Ш¬Ш№Щ„ Щ…Щ„Ш§ЩғШ§ ЩҠШӯШ§ЩҒШё Ш№Щ„Щү ШҘШөШЁШ№ЩҮ Щ…ШҙЩҠШұШ§ЩҺ ЩҶШӯЩҲ Ш§Щ„ШҙЩ…Ші ЩҲШҘЩҶШіШ§ЩҶ Щ…ЩҶ Ш§Щ„Ш·ЩҠЩҲШұШҢ Щ…Ш№ ШЈШ¬ЩҶШӯШ©ШҢ ШЈШҜЩү ШӘЩҶЩҒЩҠШ° ШӘШөЩ…ЩҠЩ…ЩҮШ§ ШҘЩ„Щү Ш§Ш®ШӘШұШ§Ш№ Ш§Щ„ШіШ§Ш№Ш§ШӘШҢ ШЁШіШЁШЁ ШӯШ¬Щ…ЩҮШ§ ЩҲШӘШ№ЩӮЩҠШҜЩҮШ§ШҢ ЩҲЩӮШҜ ШЁЩҶЩҠШӘ Щ…Ш№ШёЩ… ЩҮШ°ЩҮ Ш§Щ„ШіШ§Ш№Ш§ШӘ ЩҒЩҠ Щ…ШұЩғШІ Ш§Щ„Щ…ШҜЩҠЩҶШ©. ЩғШ§ЩҶ ЩҲШ§ШӯШҜШ§ЩҺ Щ…ЩҶ ЩҮШ°ЩҮ Ш§Щ„ШіШ§Ш№Ш§ШӘ Ш§Щ„ЩғШЁЩҠШұШ© ШіШӘШұШ§ШіШЁЩҲШұШәШҢ Ш§Щ„Ш°ЩҠ ШЁЩҶЩҠ ЩҒЩҠ Ш§Щ„ЩӮШұЩҶ Ш§Щ„ШұШ§ШЁШ№ Ш№ШҙШұ Ш§Щ„Ш°ЩҠ ЩҠЩҲШ¬ШҜ Ш№Щ„Щү ЩғШ§Щ…Щ„ Ш¬ШҜШ§Шұ Ш§Щ„ЩғШ§ШӘШҜШұШ§ШҰЩҠШ©. ЩғЩ…Ш§ ШЈЩҶЩҮ ЩҠШӯШӘЩҲЩҠ Ш№Щ„Щү ШӘЩӮЩҲЩҠЩ… ЩҒЩ„ЩғЩҠШҢ ЩҲШ§Щ„ШўЩ„ЩҠ ЩҲШӘШөЩҲШұ Ш§Щ„ШӯЩҠЩҲШ§ЩҶШ§ШӘШҢ ЩҲШ§Щ„ЩӮШҜЩҠШіЩҠЩҶ ЩҲШӯЩҠШ§Ш© Ш§Щ„Щ…ШіЩҠШӯ.Щ„Ш§ ЩҠШІШ§Щ„ ЩҠШ№Щ…Щ„ Ш№Щ„Щү Щ…ШҜШ§Шұ Ш§Щ„ШіШ§Ш№Ш© ШӯШӘЩү ЩҠЩҲЩ…ЩҶШ§ ЩҮШ°Ш§ ЩҲЩ„ЩғЩҶ ШҙЩҮШҜ Ш№ШҜШ© ШӘШұЩ…ЩҠЩ…Ш§ШӘ Щ…ЩҶШ° Ш§Щ„ШЁЩҶШ§ШЎ Ш§Щ„ШЈЩҲЩ„. ЩҲЩғШ§ЩҶ ШЈЩҲЩ„ ЩҲШөЩҒ Щ…ЩҶ ШіШ§Ш№Ш© Ш§Щ„ЩҲЩӮЩҲШ§ЩӮ Ш§Щ„ШӯШҜЩҠШ«Ш© Ш§ЩҲШәШіШЁЩҲШұШә Ш§Щ„ЩҶШЁЩҠЩ„ ЩҒЩҠЩ„ЩҠШЁ ЩҒЩҠ Ш№Ш§Щ… 1629.ШӘШ№ЩҲШҜ Ш№ЩӮШ§ШұШЁ Ш§Щ„ШіШ§Ш№Ш© ШҘЩ„Щү ШЈЩ…ЩҠШұ ЩҒЩҲЩҶ ШіЩғШіЩҲЩҶЩҠШ§. ЩӮШЁЩ„ 1650ШҢ ЩҒЩҮЩҲ ЩҒЩҮЩ… Ш·ШұЩҠЩӮШ© Ш№Щ…Щ„ Ш§Щ„ЩҲЩӮЩҲШ§ЩӮ Ш§Щ„Щ…ЩҠЩғШ§ЩҶЩҠЩғЩҠШ© ЩҲШӘЩ… ЩҶШҙШұЩҮШ§ Ш№Щ„Щү ЩҶШ·Ш§ЩӮ ЩҲШ§ШіШ№ ЩҒЩҠ ЩғШӘЩҠШЁ ШЈШ«ЩҶШ§ШіЩҠЩҲШі ЩғЩҠШұШҙШұ Ш№Щ„Щү Ш§Щ„Щ…ЩҲШіЩҠЩӮЩүШҢ ЩҒЩҠ Щ…Ш§ ЩҮЩҲ Ш§Щ„ЩҲШөЩҒ Ш§Щ„ШЈЩҲЩ„ Щ…ЩҲШ«ЩӮ Щ„ЩғЩҠЩҒЩҠШ© Ш№Щ…Щ„ Ш§Щ„ЩҲЩӮЩҲШ§ЩӮ Ш§Щ„Щ…ЩҠЩғШ§ЩҶЩҠЩғЩҠШ©ШҢ Ш§Щ„Ш°ЩҠ ЩҲШөЩҒ Ш¬ЩҮШ§ШІ Щ…ЩҠЩғШ§ЩҶЩҠЩғЩҠ Щ…Ш№ Ш§Щ„Ш№ШҜЩҠШҜ Щ…ЩҶ Ш§Щ„ШҙШ®ШөЩҠШ§ШӘ Ш§Щ„ШўЩ„ЩҠШ©. ЩҲЩҒЩҠ Ш§Щ„ЩӮШұЩҶ Ш§Щ„Ш«Ш§Щ…ЩҶ Ш№ШҙШұ ЩҒЩҠ ШЈЩ„Щ…Ш§ЩҶЩҠШ§ШҢ ШЁШҜШЈШӘ clock-makers ШЁШөЩҶШ№ ШіШ§Ш№Ш§ШӘ Ш§Щ„ЩҲЩӮЩҲШ§ЩӮ Щ„Щ„ШЁЩҠШ№.
Ш§Щ„Щ…Ш¬ШіЩ…Ш§ШӘ Ш§Щ„Ш¬Ш§Ш°ШЁШ© Щ„Щ„ШІЩҲШ§Шұ
ЩҲЩ„ЩҠЩ…Ш© ЩҒЩҠ ЩғШ§Щ…ЩҠЩ„Ш§ ШЈШұШ§ШәЩҲЩҶ ЩҒЩҠ ШҘЩҠШ·Ш§Щ„ЩҠШ§ШҢ 1475ШҢ ЩҲШЈШёЩҮШұШӘ ШЁШ№Ш¶Ш§ЩӢ Щ…ЩҶ Ш§Щ„Щ…ЩҠЩғШ§ШӘШұЩҲЩҶЩғШі Ш§Щ„ЩҶШ§ШЁШ¶Ш© ШЁШ§Щ„ШӯЩҠШ§Ш©. ЩғШ§ЩҶ Ш§Щ„Щ…ЩҠЩғШ§ШӘШұЩҲЩҶЩғ Ш¬ШІШЎШ§Щ‘ Щ…ЩҶ Ш§Щ„Ш№ШұШ¶ Ш§Щ„ШЈЩғШЁШұ Ш§Щ„Ш°ЩҠ Ш§ШіШӘЩ…Шұ Ш№Щ„Щү Щ…ШҜЩү ШЈЩҠШ§Щ….ЩҲЩҒЩҠ Ш№Ш§Щ… 1454ШҢ ШЈЩҶШҙШЈ ЩҒЩҠЩ„ЩҠШЁ ШҜЩҲЩӮ Ш№ШұШ¶Ш§ Ш§Щ„ШӘШұЩҒЩҠЩҮ ЩҠШҜШ№Щү Ш№ЩҠШҜ ШЁШ§ЩҮШёШ© Щ…ЩҶ Ш§Щ„ШҜШұШ§Ш¬ШҢ Ш§Щ„Ш°ЩҠ ЩғШ§ЩҶ ЩҠЩҮШҜЩҒ ШҘЩ„Щү Ш§Щ„ШӘШЈШ«ЩҠШұ Ш№Щ„Щү Ш§Щ„ШҙШ№ШЁ Щ„Щ„Щ…ШҙШ§ШұЩғШ© ЩҒЩҠ ШӯЩ…Щ„Ш© ШөЩ„ЩҠШЁЩҠШ© Ш¶ШҜ Ш§Щ„Ш№Ш«Щ…Ш§ЩҶЩҠЩҠЩҶ ЩҲЩ„ЩғЩҶ Ш§ЩҶШӘЩҮЩү Ш§Щ„ШЈЩ…Шұ ШЁШ№ШұШ¶ ЩғШЁЩҠШұ Щ…ЩҶ ШЈЩҶЩҠЩ…Ш§ШӘШұЩҶЩғШіШҢ Ш№Щ…Ш§Щ„ЩӮШ©ШҢ ЩҲШЈЩӮШІШ§Щ…. Ш¬ЩҠЩҲЩҒШ§ЩҶЩҠ ЩҒЩҲЩҶШӘШ§ЩҶШ§ШҢ ЩҲЩҮЩҲ Щ…ЩҮЩҶШҜШі Ш№Ш§Щ… 1420ШҢ ЩҲШ¶Ш№ ШҜЩ…ЩҠШ© Щ…ЩҶ Ш§Щ„ЩғШ§Щ…Щ„ЩҠШҜ ЩҠЩӮЩҲШҜЩҮШ§ Ш§Щ„ШұШҰЩҠШіЩҠ Ш§Щ„Щ…Щ„ШЁШі Ш¶Ш№ЩҒ Ш§ШұШӘЩҒШ§Ш№ Щ„Щ„ШҘЩҶШіШ§ЩҶ ЩҲШҘЩҶШіШ§ЩҶ Щ…ЩҶ Щ…ШұЩҠЩ… Ш§Щ„Щ…Ш¬ШҜЩ„ЩҠШ©.
Ш§Щ„ШӘШ·ШЁЩҠЩӮШ§ШӘ
Ш§Щ„ШӘШ·ШЁЩҠЩӮШ§ШӘ Ш§Щ„ШӯШҜЩҠШ«Ш©
 Ш§Щ„Ш§ЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі
Ш§Щ„Ш§ЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі
Щ…ШЁШ§ШҜШҰ Ш§Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі Ш§Щ„ШӯШҜЩҠШ«Ш© ЩҠЩ…ЩғЩҶ Ш§Щ„Ш№Ш«ЩҲШұ Ш№Щ„ЩҠЩҮШ§ ЩҒЩҠ Ш§Щ„ШұЩҲШЁЩҲШӘШ§ШӘ Ш§Щ„ЩӮШҜЩҠЩ…Ш©. ЩҲЩҒЩҠ ШӯЩҠЩҶ ШЈЩҶ ШЁШ№Ш¶ ЩҮШ°ЩҮ Ш§Щ„ШұЩҲШЁЩҲШӘШ§ШӘ ЩғШ§ЩҶШӘ ЩҒЩҠ Ш§Щ„ЩҲЩӮШӘ Ш§Щ„ЩӮШҜЩҠЩ… Ш§Щ„Ш®Ш§Шө ШЁШ§Щ„ШұЩҲШЁЩҲШӘШ§ШӘ Щ„ШЈЩҶ ШӘШӯШұЩҠЩғ Ш§Щ„ШұЩҲШЁЩҲШӘШ§ШӘ ЩғШ§ЩҶ ЩӮШЁЩ„ ШЈЩҶ ШӘШөШЁШӯ Щ„Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі ШҙШ№ШЁЩҠШ©.
ЩҲЩғШ§ЩҶ Ш§Щ„ШӘШӯШұЩҠЩғ Щ„Щ„ШёЩҮЩҲШұ ШЈЩ…Ш§Щ… Ш§Щ„Ш¬Щ…ЩҮЩҲШұ Ш§Щ„ЩғЩ„ШЁ ЩҲШ§Щ„ШӯШөШ§ЩҶ. ЩғШ§ЩҶШӘ Ш®Щ„Ш§Щ„ Щ…Ш№ШұШ¶ ЩҶЩҠЩҲЩҠЩҲШұЩғ Ш§Щ„ШҜЩҲЩ„ЩҠ 1939. ШіШЁШ§ШұЩғЩҲШҢ Ш§Щ„ШұЩҲШЁЩҲШӘ Ш§Щ„ЩғЩ„ШЁШҢ ЩҲШ§Щ„ШӯЩҠЩҲШ§ЩҶШ§ШӘ Ш§Щ„ШЈЩ„ЩҠЩҒШ© Щ…ЩҶ ШҘЩ„ЩғШӘШұЩҲ Щ„Щ„ШұЩҲШЁЩҲШӘШҢ ЩҲЩҠШӨШҜЩҠ ШЈЩ…Ш§Щ… Ш§Щ„Ш¬Щ…ЩҮЩҲШұ ЩҒЩҠ Щ…Ш№ШұШ¶ ЩҶЩҠЩҲЩҠЩҲШұЩғ Ш§Щ„ШҜЩҲЩ„ЩҠ 1939 ЩҲЩ„ЩғЩҶ ШіШЁШ§ШұЩғЩҲ Щ„ЩҠШі Щ…Ш«Щ„ Ш§Щ„ШұЩҲШЁЩҲШӘШ§ШӘ Ш§Щ„Ш№Ш§ШҜЩҠШ©. ШіШЁШ§ШұЩғЩҲ ЩҠЩ…Ш«Щ„ Ш§Щ„ШӯЩҠЩҲШ§ЩҶШ§ШӘ Ш§Щ„ШӯЩҠШ©ШҢ Щ„ЩҠШөШЁШӯ ШЁШ°Щ„Щғ ШЈЩҲЩ„ ШҙШ®ШөЩҠШ© Щ…ШӘШӯШұЩғШ© Щ„Щ„Ш№ШөШұ Ш§Щ„ШӯШҜЩҠШ«ШҢ Ш¬ЩҶШЁШ§ЩҺ ШҘЩ„Щү Ш¬ЩҶШЁ Щ…Ш№ Ш§Щ„ШӯШөШ§ЩҶ Ш§Щ„Ш°ЩҠ Щ„Щ… ЩҠЩғШҙЩҒ Ш№ЩҶ Ш§ШіЩ…ЩҮ. ЩғШ§ЩҶ Ш§Щ„ШұШ§ЩғШЁ Ш№Щ„Щү Ш§Щ„ШӯШөШ§ЩҶ Щ…ШӘШӯШұЩғШ§ЩҺ ЩҒЩҠ Щ…Ш№ШұШ¶ ЩҒЩҠ Ш№Ш§Щ… 1939.
ЩғШ«ЩҠШұШ§ Щ…Ш§ ЩҠШ№ШІЩҲ ЩҲШ§Щ„ШӘ ШҜЩҠШІЩҶЩҠ Щ„ШӘШ№Щ…ЩҠЩ… ШӘЩӮЩҶЩҠШ§ШӘ Ш§Щ„ШӘШӯШұЩҠЩғ Щ„Щ„ШӘШұЩҒЩҠЩҮ ШЁШ№ШҜ ШЈЩҶ Ш§ШҙШӘШұЩү Ш§Щ„Ш·ЩҠЩҲШұ Ш§Щ„Щ…ШӘШӯШұЩғШ© ШЁЩҠЩҶЩ…Ш§ ЩғШ§ЩҶ ЩҠЩӮШ¶ЩҠ Ш№Ш·Щ„Ш©ШҢ Ш№Щ„Щү Ш§Щ„ШұШәЩ… Щ…ЩҶ Ш§Щ„Ш¬ШҜЩ„ ШЁШҙШЈЩҶ Щ…Ш§ ШҘШ°Ш§ ЩғШ§ЩҶ ЩҒЩҠ ЩҶЩҠЩҲ Ш§ЩҲШұЩ„ЩҠШ§ЩҶШІ ШЈЩҲ ШЈЩҲШұЩҲШЁШ§. ЩҲЩӮШҜ ШұЩғШІШӘ ШұШӨЩҠШ© ШҜЩҠШІЩҶЩҠ Ш§Щ„ШіЩ…Ш№ЩҠШ© ЩҲШ§Щ„ШӘШӯШұЩҠЩғ ЩҒЩҠ Ш§Щ„Щ…ЩӮШ§Щ… Ш§Щ„ШЈЩҲЩ„ Ш№Щ„Щү ШҙШ§ШҙШ§ШӘ Ш§Щ„ЩҲШ·ЩҶЩҠШ© ШЁШҜЩ„Ш§ Щ…ЩҶ Ш§Щ„Щ…Щ„Ш§ЩҮЩҠ.
ЩҒЩҠ Ш№Ш§Щ… 1951ШҢ ШЁШ№ШҜ Ш№Ш§Щ…ЩҠЩҶ Щ…ЩҶ Ш§ЩғШӘШҙШ§ЩҒ ЩҲШ§Щ„ШӘ ШҜЩҠШІЩҶЩҠ Ш§Щ„ШӘШӯШұЩҠЩғШҢ ЩғЩ„ЩҒ Ш§Щ„Щ…Ш§ЩғЩҶЩҮ ШЁШұЩҲШәЩҠ ШұЩҲШ¬ШұЩҲШ§Щ„ЩҶШӯШ§ШӘ ЩҲШ§Ш«Щ„ ШұЩҲШ¬ШұШІ Щ„ЩӮЩҠШ§ШҜШ© Ш§Щ„ЩҒШұЩҠЩӮ Ш§Щ„Щ…ЩғЩ„ЩҒ Щ„ШөЩҶШ№ Ш§Щ„ШұЩӮЩ… Ш·ЩҲЩҠЩ„ Ш§Щ„ЩӮШ§Щ…Ш© 9 Ш§Щ„ШӘЩҠ ЩҠЩ…ЩғЩҶ ШЈЩҶ ЩҠШӘШӯШұЩғ ЩҲЩҠШӘШӯШҜШ« ЩҲЩ…ШӯШ§ЩғШ§Ш© ШұЩӮШөШ§ШӘ ЩҠШӨШҜЩҠЩҮШ§ Ш§Щ„ШЈШөШҜЩӮШ§ШЎ. ЩҲЩғШ§ЩҶ Ш№ЩҶЩҲШ§ЩҶ Ш§Щ„Щ…ШҙШұЩҲШ№ В«Щ…ШҙШұЩҲШ№ Щ„ЩҠШӘЩ„ Щ…Ш§ЩҶВ» ЩҲЩ„ЩғЩҶ ШӘЩ… Ш§Щ„Ш§ЩҶШӘЩҮШ§ШЎ ШЈШЁШҜШ§ЩҺ. ЩҲШЁШ№ШҜ Щ…ШұЩҲШұ Ш№Ш§Щ…ШҢ ШӘЩ… ШҘЩҶШҙШ§ШЎ ЩҲШ§Щ„ШӘ ШҜЩҠШІЩҶЩҠ Щ„Щ„ШӘШ®ЩҠЩ„ Ш§Щ„Ш§ШЁШӘЩғШ§ШұЩҠ.
ШЁШ№ШҜ В«Щ…ШҙШұЩҲШ№ Щ„ЩҠШӘЩ„ Щ…Ш§ЩҶВ»ШҢ ЩҲЩғШ§ЩҶ ЩҒШұЩҠЩӮ Ш§Щ„ШӘШ®ЩҠЩ„ Ш§Щ„Ш§ШЁШӘЩғШ§ШұЩҠ ЩҒЩҠ ШЈЩҲЩ„ Щ…ШҙШұЩҲШ№ ШҜЩҠШІЩҶЩҠ Щ„В«ШұШҰЩҠШі Ш§Щ„ШөЩҠЩҶВ» Ш§Щ„Ш°ЩҠ ШЈЩӮЩҠЩ… Ш§Щ„Щ…Ш№ШұШ¶ ЩҒЩҠ ШЁЩҮЩҲ Щ…ЩҶШ§ШөШЁЩҮЩ…. ЩҲЩҠЩ…ЩғЩҶ Щ„Щ„Ш№Щ…Щ„Ш§ШЎ Ш·ШұШӯ Ш§Щ„ШЈШіШҰЩ„Ш© ЩҲШ§ЩҶЩҮШ§ ШіШӘШұШҜ Щ…Ш№ ЩғЩ„Щ…Ш§ШӘ Ш§Щ„ШӯЩғЩ…Ш©.
ШЁШҜШЈШӘ ШҙШұЩғШ© ШҘЩҶШӘШ§Ш¬ ЩҲШ§Щ„ШӘ ШҜЩҠШІЩҶЩҠ ШЁШ§ШіШӘШ®ШҜШ§Щ… ШӘЩӮЩҶЩҠШ§ШӘ Ш§Щ„ШӘШӯШұЩҠЩғ ЩҒЩҠ Ш№Ш§Щ… 1955 Щ„ШұЩғЩҲШЁ ШҜЩҠШІЩҶЩҠ Щ„Ш§ЩҶШҜШҢ Ш§Щ„ШәШ§ШЁШ© ЩғШұЩҲШІШҢ ЩҲЩҒЩҠ ЩҲЩӮШӘ Щ„Ш§ШӯЩӮ Щ„Ш¬Ш§Ш°ШЁЩҠШӘЩҮШ§ Щ…ШіШӯЩҲШұ ШәШұЩҒШ© ШӘЩҠЩғЩҠ ЩҲШ§Щ„ШӘ ШҜЩҠШІЩҶЩҠ Ш§Щ„ШӘЩҠ ШёЩҮШұШӘ ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі Щ…ШіШӯЩҲШұ ШӘЩҠЩғЩҠ Ш§Щ„Ш·ЩҠЩҲШұ.
ЩғШ§ЩҶ ШҙШ®ШөЩҠШ© Ш§Щ„ШҘЩҶШіШ§ЩҶ Ш§Щ„ШЈЩҲЩ„ ШЁШ§ЩғШӘЩ…Ш§Щ„ Ш§Щ„ШіЩ…Ш№ЩҠШ© ЩҲЩ…ШӘШӯШұЩғ Ш§ШЁШұШ§ЩҮШ§Щ… Щ„ЩҶЩғЩҲЩ„ЩҶШҢ Ш§Щ„ШӘЩҠ ШЈЩҶШҙШЈШӘЩҮШ§ ЩҲШ§Щ„ШӘ ШҜЩҠШІЩҶЩҠ ЩҒЩҠ Ш№Ш§Щ… 1964 Щ„Щ…Ш№ШұШ¶ ЩҒЩҠ Ш№Ш§Щ… 1964 Ш§Щ„Ш№Ш§Щ„Щ…ЩҠ ЩҒЩҠ ЩҶЩҠЩҲЩҠЩҲШұЩғ. ЩҒЩҠ Ш№Ш§Щ… 1965ШҢ ЩҲШұЩҒШ№ Щ…ШіШӘЩҲШ§ЩҮШ§ ШҜЩҠШІЩҶЩҠ ЩҲШөШ§Шә ШЈЩҶЩҮШ§ Щ„ЩҠЩҶЩғЩҲЩ„ЩҶ Щ…Ш§ШұЩғ Ш§Щ„Ш«Ш§ЩҶЩҠШҢ ЩҲШ§Щ„ШӘЩҠ ШёЩҮШұШӘ ЩҒЩҠ ШҜШ§Шұ Ш§Щ„ШЈЩҲШЁШұШ§ ЩҒЩҠ Щ…ЩҶШӘШ¬Ш№ ШҜЩҠШІЩҶЩҠ Щ„Ш§ЩҶШҜ ЩҒЩҠ ЩғШ§Щ„ЩҠЩҒЩҲШұЩҶЩҠШ§ Щ„Щ…ШҜШ© Ш«Щ„Ш§Ш«Ш© ШЈШҙЩҮШұШҢ ШЈШ¬ШұЩү Щ„ЩҠЩҶЩғЩҲЩ„ЩҶ Ш§Щ„ШЈШөЩ„ЩҠ ЩҒЩҠ ЩҶЩҠЩҲЩҠЩҲШұЩғШҢ ЩҒЩҠ ШӯЩҠЩҶ ШЈЩҶ Щ„ЩҶЩғЩҲЩ„ЩҶ Щ…Ш§ШұЩғ Ш§Щ„Ш«Ш§ЩҶЩҠ Щ„Ш№ШЁ Ш§Щ„Ш№ШұЩҲШ¶ ЩҒЩҠ ШҜЩҠШІЩҶЩҠ Щ„Ш§ЩҶШҜ. ЩғШ§ЩҶШӘ Щ…Ш·Ш§ШЁЩӮШ© Щ„ШәШ© Ш§Щ„Ш¬ШіШҜ ЩҲШӯШұЩғШ§ШӘ Ш§Щ„ЩҲШ¬ЩҮ ШҘЩ„Щү Ш§Щ„ЩғЩ…Ш§Щ„ Щ…Ш№ Ш®Ш·Ш§ШЁ Щ…ШіШ¬Щ„. ШЈШ№ШұШЁ Ш§Щ„Щ…Щ…Ш«Щ„ Ш§Щ„Щ…Щ„ЩғЩҠ ШҜШ§ЩҶЩҲ Ш§Щ„ЩҶШіШ®Ш© Ш§Щ„ШӘШӯШұЩҠЩғ Щ…ЩҶ Ш§ШЁШұШ§ЩҮШ§Щ… Щ„ЩҶЩғЩҲЩ„ЩҶ.
Щ…ШӯШёЩҲШё Ш§Щ„ШҜЩҠЩҶШ§ШөЩҲШұ ЩҮЩҲ Segnosaurus ШӯЩҲШ§Щ„ЩҠ 8 ШЈЩӮШҜШ§Щ… Ш·ЩҲЩҠЩ„ Ш§Щ„ЩӮШ§Щ…Ш© (2.4 Щ…) Ш§Щ„ШЈШ®Ш¶Шұ Ш§Щ„Ш°ЩҠ ЩҠШіШӯШЁ Ш№ШұШЁШ© Щ…ШәШ·Ш§Ш© Ш§Щ„ШІЩҮЩҲШұ ЩҲЩҠЩӮЩҲШҜЩҮШ§ В«ШӘШҙШ§ЩҶШҜЩ„Шұ Щ…Ш№Ш§Щ„Ш¬ Ш§Щ„ШҜЩҠЩҶШ§ШөЩҲШұВ». Щ…ШӯШёЩҲШё ЩҮЩҲ Щ…Щ„ШӯЩҲШё ЩҒЩҠ ШЈЩҶЩҮ ЩғШ§ЩҶ ШЈЩҲЩ„ ШҙШ®ШөЩҠШ© Ш®Ш§Щ„ЩҠШ© Щ…ЩҶ Ш¬ЩҲШ§Щ„Ш© Ш§Щ„ШіЩ…Ш№ЩҠШ© ЩҲЩ…ШӘШӯШұЩғ. Ш§Щ„Ш№ШұШЁШ© ШІЩҮШұШ© ЩҠШіШӯШЁ ЩҠШ®ЩҒЩҠ Ш§Щ„Щ…ШөШҜШұ Ш§Щ„ЩғЩ…ШЁЩҠЩҲШӘШұ ЩҲШ§Щ„ШіЩ„Ш·Ш©.
ЩҲШ§Щ„ШҜЩ…Щү Ш§Щ„Щ…ШӯЩ…ЩҲЩ„Ш© ЩҮЩҠ Ш®Ш§Щ„ЩҠШ© Щ…ЩҶ Ш§Щ„Щ…ШӘШ¬ЩҲЩ„ЩҠЩҶШҢ Ш§Щ„ШіЩ…Ш№ЩҠШ© ЩҲЩ…ШӘШӯШұЩғ Ш§Щ„ШӘШұЩҒЩҠЩҮ Ш¬Ш°ШЁ ШөЩ…Щ…ЩҮ ЩҲШ§Щ„ШӘ ШҜЩҠШІЩҶЩҠ ЩҒЩҠ Ш§Щ„ШӘШ®ЩҠЩ„ Ш§Щ„Ш§ШЁШӘЩғШ§ШұЩҠ. Ш§Ш«ЩҶЩҠЩҶ Щ…ЩҶ ШҙШ®ШөЩҠШ§ШӘ Ш§Щ„Ш№ШұШ§ШҰШіШҢ Ш§Щ„ШҜЩғШӘЩҲШұ ШЁЩҶШіЩҶ Ш§Щ„Щ…ЩҶ ЩҲЩ…ШіШ§Ш№ШҜ Щ„ЩҮШҢ ШЁЩҠЩғШұШҢ ЩҲШ§Щ„Ш·ЩҠШ§Шұ Ш§Щ„ШіЩҠШ§ШұШ© Щ…ЩҶ Ш®Щ„Ш§Щ„ Ш§Щ„ШӯШҜЩҠЩӮШ©ШҢ Ш§Щ„ШӘЩҠ ШӘШӘЩҒШ§Ш№Щ„ Щ…Ш№ Ш§Щ„Ш¶ЩҠЩҲЩҒ ЩҲШӘЩҶШҙШұ Ш§Щ„Щ…ШӨШ«ШұШ§ШӘ Ш§Щ„Ш®Ш§ШөШ© Щ…Ш«Щ„ Ш°Шұ Ш§Щ„Ш¶ШЁШ§ШЁШҢ ЩҲЩ…ШҜШ§ЩҒШ№ ШӯЩ„ЩҲЩҠШ§ШӘ Ш·Ш§ШҰШұШ§ШӘ ШұШҙШ§ШҙШ©. ЩҲШӘЩҶШӘШҙШұ ШӯШ§Щ„ЩҠШ§ ЩҒЩҠ ШҜЩҠШІЩҶЩҠ Щ„Ш§ЩҶШҜ ЩҒЩҠ ЩҮЩҲЩҶШ¬ ЩғЩҲЩҶШ¬.
Ш§Щ„ЩҒЩҠЩ„Щ… ЩҲШ§Щ„ШӘЩ„ЩҒЩҠШІЩҠЩҲЩҶ
ЩҲЩғШ§ЩҶШӘ ШөЩҶШ§Ш№Ш© Ш§Щ„ЩҒЩҠЩ„Щ… Ш§Щ„ЩӮЩҲШ© Ш§Щ„ШҜШ§ЩҒШ№Ш© ЩҒЩҠ Ш§Щ„ШӘЩғЩҶЩҲЩ„ЩҲШ¬ЩҠШ§ Ш§Щ„Щ…ШіШӘШ®ШҜЩ…Ш© Щ„ШӘШ·ЩҲЩҠШұ ШӘЩӮЩҶЩҠШ§ШӘ Ш§Щ„ШӘШӯШұЩҠЩғ.
ЩҲШӘШіШӘШ®ШҜЩ… ШӘЩӮЩҶЩҠШ§ШӘ Ш§Щ„ШӘШӯШұЩҠЩғ ЩҒЩҠ Ш§Щ„ШӯШ§Щ„Ш§ШӘ Ш§Щ„ШӘЩҠ ЩҠЩғЩҲЩҶ ЩҒЩҠЩҮШ§ Ш№ШҜЩ… ЩҲШ¬ЩҲШҜ Ш§Щ„Щ…Ш®Щ„ЩҲЩӮШҢ ЩҲШ§Щ„Ш№Щ…Щ„ ЩҮЩҲ Щ…Ш®Ш§Ш·ШұШ© ЩғШЁЩҠШұШ© Ш¬ШҜШ§ ШЈЩҲ Щ…ЩғЩ„ЩҒШ© Щ„Ш§ШіШӘШ®ШҜШ§Щ… Ш§Щ„Ш¬ЩҮШ§ШӘ Ш§Щ„ЩҒШ§Ш№Щ„Ш© ШЈЩҲ ШӯЩҠЩҲШ§ЩҶШ§ШӘ ШӯЩӮЩҠЩӮЩҠШ©ШҢ ШЈЩҲ Ш№Щ…Щ„ Щ„Ш§ ЩҠЩ…ЩғЩҶ ШЈШЁШҜШ§ ШЈЩҶ ЩҠШӯШөЩ„ Щ…Ш№ ШҙШ®Шө ШӯЩҠ ШЈЩҲ ШӯЩҠЩҲШ§ЩҶ. Щ…ЩҠШІШӘЩҮ Ш§Щ„ШұШҰЩҠШіЩҠШ© Ш№Щ„Щү CGI ЩҲШ§Щ„ШӘЩҲЩӮЩҒ Ш№ЩҶ Ш§Щ„ШӯШұЩғШ© ЩҮЩҠ ШЈЩҶ Ш§Щ„Щ…Ш®Щ„ЩҲЩӮ Щ…ШӯШ§ЩғШ§Ш© Щ„ЩҮ ЩҲШ¬ЩҲШҜ Щ…Ш§ШҜЩҠ ЩҠШӘШӯШұЩғ ШЈЩ…Ш§Щ… Ш§Щ„ЩғШ§Щ…ЩҠШұШ§ ЩҒЩҠ Ш§Щ„ЩҲЩӮШӘ Ш§Щ„ШӯЩӮЩҠЩӮЩҠ. ШЈШөШЁШӯШӘ Ш§Щ„ШӘЩғЩҶЩҲЩ„ЩҲШ¬ЩҠШ§ ЩҲШұШ§ШЎ Ш§Щ„ШӘШӯШұЩҠЩғ ШЈЩғШ«Шұ ШӘЩӮШҜЩ…Ш§ ЩҲШӘШ·ЩҲШұШ§ Ш№Щ„Щү Щ…Шұ Ш§Щ„ШіЩҶЩҠЩҶШҢ Щ…Щ…Ш§ Ш¬Ш№Щ„ Ш§Щ„ШҜЩ…Щү ШӘШЁШҜЩҲ ШЈЩғШ«Шұ ШӯЩҠЩҲЩҠШ©.
ШӘЩ… ШҘШҜШ®Ш§Щ„ ШӘЩӮЩҶЩҠШ§ШӘ Ш§Щ„ШӘШӯШұЩҠЩғ ШЈЩҲЩ„ Щ…ШұШ© Щ…ЩҶ ЩӮШЁЩ„ ШҜЩҠШІЩҶЩҠ ЩҒЩҠ Ш№Ш§Щ… 1964 ЩҒЩҠЩ„Щ… Щ…Ш§ШұЩҠ ШЁЩҲШЁЩҠЩҶШі Ш§Щ„ШӘЩҠ ШёЩҮШұШӘ Ш§Щ„Ш·ЩҠЩҲШұ Щ…ШӘШӯШұЩғШ©. ЩҲЩ…ЩҶШ° Ш°Щ„Щғ Ш§Щ„ШӯЩҠЩҶШҢ ШӘЩ… Ш§ШіШӘШ®ШҜШ§Щ… ШӘЩӮЩҶЩҠШ§ШӘ Ш§Щ„ШӘШӯШұЩҠЩғ Ш№Щ„Щү ЩҶШ·Ш§ЩӮ ЩҲШ§ШіШ№ ЩҒЩҠ ШЈЩҒЩ„Ш§Щ… Щ…Ш«Щ„ Ш§Щ„ЩҒЩғ Ш§Щ„Щ…ЩҒШӘШұШіШҢ ЩҲШҘЩҠ.ШӘЩҠ. ЩҲШ®Ш§ШұШ¬ Ш§Щ„ШЈШұШ¶ШҢ Ш§Щ„ШӘЩҠ ШӘШ№ШӘЩ…ШҜ Ш§Ш№ШӘЩ…Ш§ШҜШ§ ЩғШЁЩҠШұШ§ Ш№Щ„Щү Ш§Щ„ШӘШӯШұЩҠЩғ.
ЩҲЩғШ§ЩҶШӘ Ш§Щ„ШҘШҜШ§ШұШ© Щ…Ш«Щ„ ШіШӘЩҠЩҒЩҶ ШіШЁЩҠЩ„ШЁШұШә ЩҲШ¬ЩҠЩ… ЩҮЩҶШіЩҲЩҶ Ш§Щ„ШұЩҲШ§ШҜ ЩҒЩҠ Щ…Ш¬Ш§Щ„ Ш§ШіШӘШ®ШҜШ§Щ… ШӘЩӮЩҶЩҠШ§ШӘ Ш§Щ„ШӘШӯШұЩҠЩғ ЩҒЩҠ ШөЩҶШ§Ш№Ш© Ш§Щ„ШіЩҠЩҶЩ…Ш§.
Ш§ШіШӘШ®ШҜШ§Щ… Ш§Щ„ШӯШҜЩҠЩӮШ© Ш§Щ„Ш¬ЩҲШұШ§ШіЩҠШ© 1993 ЩҒЩҠЩ„Щ… Щ…Ш¬Щ…ЩҲШ№Ш© Щ…ЩҶ Ш§Щ„ШөЩҲШұ Ш№Щ„Щү Ш§Щ„ШӯШ§ШіЩҲШЁ ЩҲЩ„ШҜШӘ ШЁШ§Щ„ШӘШІШ§Щ…ЩҶ Щ…Ш№ ШҜЩҠЩҶШ§ШөЩҲШұ Щ…ШӘШӯШұЩғ ШЁШ§Щ„ШӯШ¬Щ… Ш§Щ„Ш·ШЁЩҠШ№ЩҠ ШЁЩҶШ§ЩҮШ§ ШіШӘШ§ЩҶ ЩҲЩҠЩҶШіШӘЩҲЩҶ ЩҲЩҒШұЩҠЩӮЩҮ. Щ…ШӘШӯШұЩғ В«ШұЩҠЩғШі T.В» ЩҲЩҠЩҶШіШӘЩҲЩҶ ЩҲШЁЩ„Шә Щ…Ш§ ЩҠЩӮШұШЁ Щ…ЩҶ 20 ЩӮШҜЩ…Ш§ (6.1 Щ…ШӘШұ)ШҢ 40 ЩӮШҜЩ… (12 Щ…ШӘШұ) ЩҒЩҠ Ш§Щ„Ш·ЩҲЩ„ ЩҲШӯШӘЩү ШЈЩғШЁШұ Ш§Щ„ШӘШӯШұЩҠЩғ ЩҲШІЩҶЩҮШ§ ЩғШ§ЩҶШӘ 9000 Ш¬ЩҶЩҠЩҮ Ш§ШіШӘШұЩ„ЩҠЩҶЩҠ (4100 ЩғЩ„Шә) ЩӮШ§ШҜШұШ© Ш№Щ„Щү ШҘШ№Ш§ШҜШ© ШӘЩ…Ш§Щ…Ш§ Щ…ШёЩҮШұ ЩҲШ§Щ„ШӯШұЩғШ© Ш§Щ„Ш·ШЁЩҠШ№ЩҠШ© Ш№Щ„Щү Ш§Щ„ШҙШ§ШҙШ© Щ…ЩҶ ШұЩҠЩғШі Ш§Щ„ШҜЩҠЩҶШ§ШөЩҲШұ ЩғШ§Щ…Щ„Ш© Ш§Щ„ШӯШ¬Щ….
ШҜШ№Ш§ Ш¬Ш§Щғ ЩҮЩҲШұЩҶШұ ШЈЩҶЩҮ В«Щ„ЩӮШҜ ЩғЩҶШӘ Ш§Щ„ШЈЩӮШұШЁ Щ…ЩҶ ШЈЩҠ ЩҲЩӮШӘ Щ…Ш¶Щү Щ„Ш№ЩҠШҙ Ш§Щ„ШҜЩҠЩҶШ§ШөЩҲШұШ§ШӘВ».ЩҲШЈШҙШ§Шұ ШіШЁЩҠЩ„ШЁШұШә ШҘЩ„Щү Ш§Щ„ШҜЩҠЩҶШ§ШөЩҲШұШ§ШӘ ШЈЩҶЩҮШ§ Щ…Ш°ЩҮЩ„Ш© - ЩҲЩ…Ш®ЩҠЩҒШ© -ЩҲЩҲШ§ЩӮШ№ЩҠШ© .
ШӘЩ… ШҘЩҶШӘШ§Ш¬ Щ…ШіЩ„ШіЩ„ ШЁЩҠ ШЁЩҠ ШіЩҠ 1999 Ш§Щ„Щ…ШҙЩҠ Щ…Ш№ Ш§Щ„ШҜЩҠЩҶШ§ШөЩҲШұШ§ШӘ ШЁШ§ШіШӘШ®ШҜШ§Щ… Щ…ШІЩҠШ¬ Щ…ЩҶ ЩҶШӯЩҲ 80ЩӘ CGI ЩҲ20ЩӘ ЩҶЩ…Ш§Ш°Ш¬ Щ…ШӘШӯШұЩғ. Ш¬ЩҲШҜШ© Ш§Щ„ШөЩҲШұ ЩғШ§ЩҶШӘ Ш¬ЩҠШҜШ©ШҢ ЩҲЩ„ЩғЩҶ ЩғШ§ЩҶШӘ Ш§Щ„ШӘШӯШұЩҠЩғ Щ„Ш§ ЩҠШІШ§Щ„ ШЈЩҒШ¶Щ„ ЩҒЩҠ Ш§Щ„Щ„ЩӮШ·Ш§ШӘ Ш№ЩҶ ШЁШ№ШҜШҢ ЩҲЩғШ°Щ„Щғ Ш§Щ„Щ…ЩӮШұШЁШ© Щ…ЩҶ Ш§Щ„ШҜЩҠЩҶШ§ШөЩҲШұШ§ШӘ. ЩҲЩӮШҜ ШөЩ…Щ…ШӘ ШіЩ„ШіЩ„Ш© Ш§Щ„ШӘШӯШұЩҠЩғ Щ…ЩҶ ЩӮШЁЩ„ ШҙШұЩғШ© Ш§Щ„ШӘШӯШұЩҠЩғ Ш§Щ„ШЁШұЩҠШ·Ш§ЩҶЩҠШ© Ш§Щ„Щ…Ш®Щ„ЩҲЩӮШ§ШӘ ЩғШұШ§ЩҲЩ„ЩҠ. ЩҲШЈШ№ЩӮШЁ ЩҮШ°Ш§ Ш§Щ„Щ…Ш№ШұШ¶ ЩҒЩҠ Ш№Ш§Щ… 2007 Щ…Ш№ Ш§Щ„ШӘЩғЩҠЩҒ Ш§Щ„Щ…ШЁШ§ШҙШұ Щ„ЩҮШ°ЩҮ Ш§Щ„ШіЩ„ШіЩ„Ш©ШҢ ЩҲШ§Щ„Щ…ШҙЩҠ Щ…Ш№ Ш§Щ„ШҜЩҠЩҶШ§ШөЩҲШұШ§ШӘ.
Ш¬ЩҠЩҒ ШЁЩҠШӘШұШіЩҲЩҶ ЩҮЩҲ ЩҮЩҠЩғЩ„ Ш№ШёЩ…ЩҠ ШЁШҙШұЩҠ Щ…ШӘШӯШұЩғШҢ ШәШ§Щ„ШЁШ§ Щ…Ш§ ЩҠШҙШ§Шұ ШҘЩ„ЩҠЩҮШ§ ШЁШ§ШіЩ… В«Ш§Щ„ЩҮЩҠЩғЩ„ Ш§Щ„Ш№ШёЩ…ЩҠ Ш§Щ„ШұЩҲШЁЩҲШӘВ»ШҢ ШЁЩҠШӘШұШіЩҲЩҶ ЩҮЩҲ ШұЩҲШЁЩҲШӘ ШҜЩ…ЩҠШ© Щ…ШӘШӯШұЩғ.
Ш§Щ„ШҘШ№Щ„Ш§Щ…
Ш§Щ„ШӯЩ…Щ„Ш© Ш§Щ„ШҘШ№Щ„Ш§ЩҶЩҠШ© Ш§Щ„ШЁШұЩҠШ·Ш§ЩҶЩҠШ© ЩғШ§ШҜШЁЩҲШұЩҠ ШЁШ№ЩҶЩҲШ§ЩҶ ШҙЩҲЩҠШЁШі ШЈШёЩҮШұШӘ Щ…Щ…Ш«Щ„ ШҜШ§Ш®Щ„ ШЁШҜЩ„Ш© ШәЩҲШұЩҠЩ„Ш§ Щ…Ш№ ЩҲШ¬ЩҮ Ш§Щ„ШұШіЩҲЩ… Ш§Щ„Щ…ШӘШӯШұЩғШ©.
ЩғШ§ЩҶ Slowskys ШӯЩ…Щ„Ш© ШҘШ№Щ„Ш§ЩҶЩҠШ© Щ„Xfinity Ш®ШҜЩ…Ш© Ш§Щ„ШҘЩҶШӘШұЩҶШӘ Ш°Ш§ШӘ Ш§Щ„ЩҶШ·Ш§ЩӮ Ш§Щ„Ш№ШұЩҠШ¶ ЩғЩҲЩ…ЩғШ§ШіШӘ ЩғЩҠШЁЩ„. ЩҠШӘЩ…ЩҠШІ Ш§Щ„ШҘШ№Щ„Ш§ЩҶ ШЁШЈЩҶЩҮ ЩҠШёЩҮШұ Ш§Ш«ЩҶЩҠЩҶ Щ…ЩҶ Ш§Щ„ШіЩ„Ш§ШӯЩҒ Ш§Щ„ШЈЩҶЩҠЩ…Ш§ШӘШұЩҲЩҶЩғШі Ш§Щ„Щ…ШӘШӯШұЩғШ©ШҢ ЩҲЩҒШ§ШІШӘ ШЁШ§Щ„Щ…ЩҠШҜШ§Щ„ЩҠШ© Ш§Щ„Ш°ЩҮШЁЩҠШ© ЩҒЩҠ Ш¬Ш§ШҰШІШ© ШҘЩҠЩҒЩҠ ЩҒЩҠ Ш№Ш§Щ… 2007.
Ш§Щ„ШЈЩ„Ш№Ш§ШЁ
ЩҲШӘШҙЩ…Щ„ ШЁШ№Ш¶ Ш§Щ„ШЈЩ…Ш«Щ„Ш© Щ…Ш«Щ„ ШӘЩҠШҜЩҠ RuxpinШҢ Ш§Щ„ЩҒЩ… Ш§Щ„ЩғШЁЩҠШұ ШЁЩҠЩ„ЩҠ ШЁШ§ШіШҢ ЩғЩҲШӘШ§ ЩҲШӘШұШ§ЩҠШіЩҠШұШ§ШӘЩҲШЁШіШҢ ШЁЩ„ЩҠЩҲШҢ WowWee ШҙЩ…ШЁШ§ЩҶШІЩҠШҢ Щ…Ш§ЩҠЩғШұЩҲШіЩҲЩҒШӘ ActimatesШҢ ЩҲFurby.
Ш§Щ„ШӘШөЩ…ЩҠЩ…
Щ…ШЁЩҶЩҠ Ш№Щ„Щү ШӯШұЩҒ Ш§Щ„ШӘШӯШұЩҠЩғ ШӯЩҲЩ„ ШҘШ·Ш§Шұ ШҜШ№Щ… ШҜШ§Ш®Щ„ЩҠШҢ Ш№Ш§ШҜШ© Щ…Ш§ ШӘЩғЩҲЩҶ Щ…ШөЩҶЩҲШ№Ш© Щ…ЩҶ Ш§Щ„ЩҒЩҲЩ„Ш§Ш°. ШӘШ№Щ„ЩӮ Ш№Щ„Щү ЩҮШ°ЩҮ В«Ш§Щ„Ш№ШёШ§Щ…В» В«Ш§Щ„Ш№Ш¶Щ„Ш§ШӘВ» Ш§Щ„ШӘЩҠ ЩҠЩ…ЩғЩҶ ШӘШөЩҶЩҠШ№ЩҮШ§ ШЁШ§ШіШӘШ®ШҜШ§Щ… Ш§Щ„ШҙШЁШ§Щғ Щ…ШұЩҶШ© ШӘШӘШЈЩ„ЩҒ Щ…ЩҶ ШӯШЁШ§ШӘ Ш§Щ„ШіШӘШ§ЩҠШұЩҠЩҶ. ЩҠЩҲЩҒШұ ШҘШ·Ш§Шұ Ш§Щ„ШҜШ№Щ… Щ„Щ„ШҘЩ„ЩғШӘШұЩҲЩҶЩҠШ§ШӘ ЩҲШ§Щ„Щ…ЩғЩҲЩҶШ§ШӘ Ш§Щ„Щ…ЩҠЩғШ§ЩҶЩҠЩғЩҠШ©ШҢ ЩҒШ¶Щ„Ш§ Ш№ЩҶ ШӘЩҲЩҒЩҠШұ ШҙЩғЩ„ Щ„Щ„Ш¬Щ„ШҜ Ш§Щ„Ш®Ш§ШұШ¬ЩҠ.
В«Ш§Щ„Ш¬Щ„ШҜВ» ШәШ§Щ„ШЁШ§ Щ…Ш§ ЩҠШөЩҶШ№ Щ…ЩҶ ШұШәЩҲШ© Ш§Щ„Щ…Ш·Ш§Ш· ЩҲШ§Щ„ШіЩҠЩ„ЩҠЩғЩҲЩҶ ШЈЩҲ ЩҠЩҲШұЩҠШӘШ§ЩҶ ШөШЁ ЩҒЩҠ ЩӮЩҲШ§Щ„ШЁ. Щ„ШӘЩҲЩҒЩҠШұ Щ…ШІЩҠШҜ Щ…ЩҶ Ш§Щ„ЩӮЩҲШ© ЩҲЩӮШ·Ш№ ЩӮШ·Ш№Ш© Щ…ЩҶ Ш§Щ„ЩӮЩ…Ш§Шҙ Ш№Щ„Щү ШӯШ¬Щ…ЩҮ ЩҲШ¬ШІШЎШ§ Щ„Ш§ ЩҠШӘШ¬ШІШЈ Щ…ЩҶ Ш§Щ„Щ…Ш·Ш§Ш· Ш§Щ„ШұШәЩҲЩҠ ШЁШ№ШҜ ШіЩғШЁЩҮ ЩҒЩҠ Ш§Щ„ЩӮШ§Щ„ШЁ. ЩҲЩҠШӘЩ… ЩҒШөЩ„ ЩғЩ„ ЩӮШ·Ш№Ш© ЩҲШӘШ№Щ„ЩӮ Ш№Щ„Щү Ш§Щ„ШіШ·Шӯ Ш§Щ„Ш®Ш§ШұШ¬ЩҠ Щ„Щ„ШҙШ®ШөЩҠШ© Щ„ШӘЩҲЩҒЩҠШұ Ш§Щ„Щ…ШёЩҮШұ ЩҲШ§Щ„Щ…Щ„Щ…Ші Щ…Щ…Ш§Ш«Щ„Ш© Щ„ШӘЩ„Щғ Ш§Щ„ШӘЩҠ Щ…ЩҶ В«Ш§Щ„Ш¬Щ„ШҜВ».
Ш§Щ„ШЁЩҶЩҠШ©
ЩҲШ№Ш§ШҜШ© Щ…Ш§ ЩҠШӘЩ… ШӘШөЩ…ЩҠЩ… Ш·Ш§ШЁШ№ Ш§Щ„ШӘШӯШұЩҠЩғ ШЈЩҶ ШӘЩғЩҲЩҶ ЩҲШ§ЩӮШ№ЩҠШ© ЩӮШҜШұ Ш§Щ„ШҘЩ…ЩғШ§ЩҶ. ЩҲШЁШ§Щ„ШӘШ§Щ„ЩҠШҢ ЩҮЩҲ Щ…ШЁЩҶЩҠ Ш№Щ„Щү ШәШұШ§Шұ ЩғЩҠЩҒ ЩҠЩ…ЩғЩҶ Ш§ЩҶ ШӘЩғЩҲЩҶ ЩҒЩҠ ЩҲШ§ЩӮШ№ Ш§Щ„ШӯЩҠШ§Ш©. ЩҒЩҠ ШҘШ·Ш§Шұ ЩҮШ°Ш§ Ш§Щ„ШұЩӮЩ… ЩҮЩҲ Щ…Ш«Щ„ В«ЩҮЩҠЩғЩ„ Ш№ШёЩ…ЩҠВ». Ш§Щ„Щ…ЩҒШ§ШөЩ„ШҢ ЩҲШ§Щ„Щ…ШӯШұЩғШ§ШӘШҢ ЩҲШ§Щ„Щ…ШӯШұЩғШ§ШӘ ШӘШ№Щ…Щ„ ШЁШ§ШіЩ… В«Ш§Щ„Ш№Ш¶Щ„Ш§ШӘВ». ШӘШұШЁШ· Ш¬Щ…ЩҠШ№ Ш§Щ„Щ…ЩғЩҲЩҶШ§ШӘ Ш§Щ„ЩғЩҮШұШЁШ§ШҰЩҠШ© Щ…Ш№Ш§ ЩҲШ§Щ„ШЈШіЩ„Ш§ЩғШҢ Щ…Ш«Щ„ В«Ш§Щ„Ш¬ЩҮШ§ШІ Ш§Щ„Ш№ШөШЁЩҠВ» Щ…ЩҶ ШӯЩҠЩҲШ§ЩҶ ШӯЩӮЩҠЩӮЩҠ ШЈЩҲ ШҙШ®Шө.
Ш§Щ„ЩҮЩҠЩғЩ„ Ш§Щ„Ш№ШёЩ…ЩҠ ШЈЩҲ Ш§Щ„ШҘШ·Ш§Шұ
ШӘШіШӘШ®ШҜЩ… Ш§Щ„Щ…ЩҲШ§ШҜ Ш§Щ„ШөЩ„ШЁШ© ЩҲШ§Щ„ШЈЩ„Щ…ЩҶЩҠЩҲЩ… ЩҲШ§Щ„ШЁЩ„Ш§ШіШӘЩҠЩғ ЩҲШ§Щ„Ш®ШҙШЁ Ш№Ш§ШҜШ© ЩҒЩҠ Ш§Щ„ШӘШӯШұЩҠЩғ ЩҲЩ„ЩғЩҶ ЩғЩ„ Щ„ШҜЩҠЩҮ ШЈЩҒШ¶Щ„ Ш§Щ„ШәШұШ¶ Щ…ЩҶЩҮ. Ш§Щ„ЩӮЩҲШ© Ш§Щ„ЩҶШіШЁЩҠШ©ШҢ ЩҲЩғШ°Щ„Щғ Ш§Щ„ЩҲШІЩҶШҢ ЩҠШ¬ШЁ ШЈШ®Ш°ЩҮ ЩҒЩҠ Ш§Щ„Ш§Ш№ШӘШЁШ§Шұ Ш№ЩҶШҜ ШӘШӯШҜЩҠШҜ Ш§Щ„Щ…Ш§ШҜШ© Ш§Щ„ШЈЩғШ«Шұ Щ…Щ„Ш§ШҰЩ…Ш© Щ„Щ„Ш§ШіШӘШ®ШҜШ§Щ…. ЩӮШҜ ШӘЩғЩҲЩҶ ШӘЩғЩ„ЩҒШ© Ш§Щ„Щ…ЩҲШ§ШҜ ШЈЩҠШ¶Ш§ Щ…ШөШҜШұШ§ ЩҺ Щ„Щ„ЩӮЩ„ЩӮ.
Ш§Щ„ШәШ·Ш§ШЎ Ш§Щ„Ш®Ш§ШұШ¬ЩҠ ШЈЩҲ Ш§Щ„Ш¬Щ„ШҜ
ШӘШіШӘШ®ШҜЩ… Ш№ШҜШ© Щ…ЩҲШ§ШҜ Ш№Ш§ШҜШ© ЩҒЩҠ ШӘШөЩҶЩҠШ№ Ш§Щ„ШҙЩғЩ„ Ш§Щ„Ш®Ш§ШұШ¬ЩҠ Щ„ШҙШ®ШөЩҠШ© Ш§Щ„ШӘШӯШұЩҠЩғ. ЩҲШӘШ№ШӘЩ…ШҜ Ш№Щ„Щү ШёШұЩҲЩҒ Ш®Ш§ШөШ©ШҢ ЩҲШЈЩҒШ¶Щ„ Ш§Щ„Щ…ЩҲШ§ШҜ ШіЩҲЩҒ ШӘШіШӘШ®ШҜЩ… Щ„ШҘЩҶШӘШ§Ш¬ Ш§Щ„ШҙЩғЩ„ Ш§Щ„ШЈЩғШ«Шұ ЩҶШ§ШЁШ¶ ШЁШ§Щ„ШӯЩҠШ§Ш©.
Ш№Щ„Щү ШіШЁЩҠЩ„ Ш§Щ„Щ…Ш«Ш§Щ„ШҢ В«Ш§Щ„Ш№ЩҠЩҲЩҶВ» ЩҲВ«Ш§Щ„ШЈШіЩҶШ§ЩҶВ» Щ…ШөЩҶЩҲШ№Ш© Ш№Ш§ШҜШ© ШӘЩ…Ш§Щ…Ш§ЩҺ Щ…ЩҶ Ш§Щ„Ш§ЩғШұЩҠЩ„ЩҠЩғ.
Щ„ШЁЩҶ Ш§Щ„ШҙШ¬Шұ ШЈЩҲ Ш§Щ„Щ„Ш§ШӘЩғШі
ЩҠШіШӘШ®ШҜЩ… Ш§Щ„Щ„Ш§ШӘЩғШі Ш§Щ„ШЈШЁЩҠШ¶ Ш№Ш§ШҜШ© ЩғШ§Щ„Щ…Ш§ШҜШ© Ш§Щ„Ш№Ш§Щ…Ш© Щ„ШЈЩҶЩҮ ЩҠШӯШӘЩҲЩҠ Ш№Щ„Щү Щ…ШіШӘЩҲЩү Ш№Ш§Щ„ Щ…ЩҶ Ш§Щ„Щ…ШұЩҲЩҶШ©. ШЁЩ„ ЩҮЩҲ ШЈЩҠШ¶Ш§ЩҺ Щ…ШЁШұЩғЩҶШҢ Щ…Щ…Ш§ ЩҠШ¬Ш№Щ„ЩҮШ§ ШіЩҮЩ„Ш© ЩҲШіШұЩҠШ№Ш© Щ„Щ„ШӘШ·ШЁЩҠЩӮ. ЩҲЩҠШӘЩ… ШҘЩҶШӘШ§Ш¬ Ш§Щ„Щ…Ш·Ш§Ш· ЩҒЩҠ ШҜШұШ¬Ш§ШӘ Ш№ШҜШ©. Ш§Щ„ШөЩҒ 74 ЩҮЩҲ ШҙЩғЩ„ Ш§Щ„ШЈЩғШ«Шұ ШҙШ№ШЁЩҠШ© Щ…ЩҶ Ш§Щ„Щ…Ш·Ш§Ш· Ш§Щ„Ш°ЩҠ ЩҠШ¬ЩҒ ШЁШіШұШ№Ш© ЩҲЩҠЩ…ЩғЩҶ ШӘШ·ШЁЩҠЩӮЩҮШ§ ЩҲШӘЩғЩҲЩҶ ШіЩ…ЩҠЩғШ© Ш¬ШҜШ§ШҢ Щ…Щ…Ш§ ЩҠШ¬Ш№Щ„ЩҮШ§ Щ…Ш«Ш§Щ„ЩҠШ© Щ„ШӘШ·ЩҲЩҠШұ Ш§Щ„ЩӮЩҲШ§Щ„ШЁ.
ШұШәЩҲШ© Ш§Щ„Щ„Ш§ШӘЩғШі Ш®ЩҒЩҠЩҒШ© Ш§Щ„ЩҲШІЩҶШҢ ЩҲЩ…ЩҶ Ш§Щ„Щ…Ш·Ш§Ш· Ш§Щ„Ш°ЩҠ ЩҠШіШӘШ®ШҜЩ… ЩҒЩҠ ШЈЩӮЩҶШ№Ш© Ш§Щ„ЩҲШ¬ЩҮ ЩҲШ§Щ„ШЈШ·ШұШ§ЩҒ Ш§Щ„ШөЩҶШ§Ш№ЩҠШ© Щ„ШӘШәЩҠЩҠШұ Щ…ШёЩҮШұ Ш§Щ„ШҙШ®Шө Ш§Щ„Ш®Ш§ШұШ¬ЩҠШҢ ЩҲЩҒЩҠ Ш§Щ„ШӘШӯШұЩҠЩғ Щ„Ш®Щ„ЩӮ В«Ш§Щ„Ш¬Щ„ШҜВ» Ш§Щ„ЩҲШ§ЩӮШ№ЩҠ. ЩғШ§ЩҶ ШіШ§ШӯШұ ШЈЩҲШІ ЩҲШ§ШӯШҜШ© Щ…ЩҶ ШЈЩҲЩ„ Ш§Щ„ШЈЩҒЩ„Ш§Щ… Щ„Щ„Ш§ШіШӘЩҒШ§ШҜШ© ЩҲШ§ШіШ№Ш© Щ…ЩҶ Ш§Щ„ШЈШ·ШұШ§ЩҒ Ш§Щ„ШөЩҶШ§Ш№ЩҠШ© ЩҲШұШәЩҲШ© Ш§Щ„Щ…Ш·Ш§Ш· ЩҒЩҠ 1930.
Ш§Щ„ШіЩҠЩ„ЩҠЩғЩҲЩҶ
ШҜЩҠШІЩҶЩҠ Щ„ШҜЩҠЩҮШ§ ЩҒШұЩҠЩӮ Ш§Щ„ШЈШЁШӯШ§Ш« Ш§Щ„Щ…ЩғШұШіШ© Щ„ШӘШӯШіЩҠЩҶ ЩҲШӘШ·ЩҲЩҠШұ ШЈШіШ§Щ„ЩҠШЁ ШЈЩҒШ¶Щ„ Щ…ЩҶ Ш®Щ„ЩӮ Ш§Щ„ШӘШӯШұЩҠЩғ Ш§Щ„Ш®Ш§ШұШ¬ЩҠШ§ШӘ ШЈЩғШ«Шұ ЩҲШ§ЩӮШ№ЩҠШ© Щ…Ш№ Ш§Щ„ШіЩҠЩ„ЩҠЩғЩҲЩҶ.
ЩҠШіШӘШ®ШҜЩ… RTV ШіЩҠЩ„ЩҠЩғЩҲЩҶ (ШҜШұШ¬Ш© ШӯШұШ§ШұШ© Ш§Щ„ШәШұЩҒШ© Ш§Щ„ЩҒЩ„ЩғЩҶШ© ШіЩҠЩ„ЩҠЩғЩҲЩҶ) ЩҒЩҠ Ш§Щ„Щ…ЩӮШ§Щ… Ш§Щ„ШЈЩҲЩ„ ЩғЩ…Ш§ШҜШ© ШөШЁ Щ„ШЈЩҶЩҮ Щ…ЩҶ Ш§Щ„ШіЩҮЩ„ Ш¬ШҜШ§ Щ„Щ„Ш§ШіШӘШ®ШҜШ§Щ… ЩҲЩ„ЩғЩҶ ШәЩҠШұ Щ…ЩғЩ„ЩҒШ© ЩҶШіШЁЩҠШ§.
ШӘШӘЩ… ШҘШІШ§Щ„Ш© Ш§Щ„ЩҒЩӮШ§Ш№Ш§ШӘ Щ…ЩҶ Ш§Щ„ШіЩҠЩ„ЩҠЩғЩҲЩҶ Ш№ЩҶ Ш·ШұЩҠЩӮ ШіЩғШЁ Щ…Ш§ШҜШ© ШіШ§ШҰЩ„Ш© ЩҒЩҠ ШӘЩҠШ§Шұ ШұЩӮЩҠЩӮШ© ШЈЩҲ Ш§Щ„ШӘШ¬ЩҮЩҠШІ ЩҒЩҠ ЩҒШұШ§Шә Ш§Щ„ШәШұЩҒШ© ЩӮШЁЩ„ Ш§ШіШӘШ®ШҜШ§Щ…ЩҮШ§. ЩҠШіШӘШ®ШҜЩ… Ш§Щ„ШіЩҠЩ„ЩҠЩғШ§ ЩғШ№Ш§Щ…Щ„ ЩҠШіШӘЩғШ«Шұ Щ„Ш·Щ„Ш§ШЎ ШЈЩғШ«Шұ ШіЩ…ЩғШ§ЩҺ Щ…ЩҶ Ш§Щ„Щ…ЩҲШ§ШҜ.
Ш§Щ„ШЁЩҲЩ„ЩҠ ЩҠЩҲШұЩҠШ«ЩҠЩҶ
Ш§Щ„ШЁЩҲЩ„ЩҠ ЩҠЩҲШұЩҠШ«Ш§ЩҶ Ш§Щ„Щ…Ш·Ш§Ш· ЩҮЩҲ ШЈЩғШ«Шұ Ш§Щ„Щ…ЩҲШ§ШҜ Ш§Щ„ЩҒШ№Ш§Щ„Ш© ШӘЩғЩ„ЩҒШ© Щ„Ш§ШіШӘШ®ШҜШ§Щ…ЩҮ ШЁШҜЩ„Ш§ Щ…ЩҶ Ш§Щ„ШіЩҠЩ„ЩҠЩғЩҲЩҶ. ЩҠШЈШӘЩҠ Ш§Щ„ШЁЩҲЩ„ЩҠ ЩҠЩҲШұЩҠШ«Ш§ЩҶ ЩҒЩҠ Щ…ШіШӘЩҲЩҠШ§ШӘ Щ…Ш®ШӘЩ„ЩҒШ© Щ…ЩҶ Ш§Щ„ШөЩ„Ш§ШЁШ© Ш§Щ„ШӘЩҠ ЩҠШӘЩ… ЩӮЩҠШ§ШіЩҮШ§ Ш№Щ„Щү Щ…ЩӮЩҠШ§Ші ШҙЩҲШұ. ЩҠШіШӘШ®ШҜЩ… Ш¬Ш§Щ…ШҜ ШұШәЩҲШ© Ш§Щ„ШЁЩҲЩ„ЩҠ ЩҠЩҲШұЩҠШ«Ш§ЩҶ ЩҒЩҠ Ш§Щ„ЩҶЩ…Ш§Ш°Ш¬ ЩҲШәШ§Щ„ШЁШ§ Щ…Ш§ ШӘШіШӘШ®ШҜЩ… ШұШәЩҲШ© Ш§Щ„ШЁЩҲЩ„ЩҠ ЩҠЩҲШұЩҠШ«Ш§ЩҶ Ш§Щ„Щ…ШұЩҶШ© ЩҒЩҠ ШЁЩҶШ§ШЎ Ш§Щ„ШҙШ®ШөЩҠШ© Ш§Щ„ЩҶЩҮШ§ШҰЩҠ Щ„ШЈЩҶЩҮ Щ…ШұЩҶ ЩҲЩҠШӘЩғЩҲЩҶ ШЁШҙЩғЩ„ Ш¬ЩҠШҜ Щ…Ш№ Ш§Щ„Щ„Ш§ШӘЩғШі.
Ш§Щ„Ш¬Шө
ШҙШ§ШҰШ№ ЩҒЩҠ Ш§Щ„ШЁЩҶШ§ШЎ ЩҲШӘШІЩҠЩҠЩҶ Ш§Щ„Щ…ЩҶШІЩ„ШҢ ЩҲШ§Щ„Ш¬Шө Щ…ШӘШ§Шӯ Ш№Щ„Щү ЩҶШ·Ш§ЩӮ ЩҲШ§ШіШ№. ШөЩ„Ш§ШЁШӘЩҮ ЩҠШӯШҜ Щ…ЩҶ Ш§ШіШӘШ®ШҜШ§Щ…ЩҮ ЩҒЩҠ ЩӮЩҲШ§Щ„ШЁ. ЩҲЩҮШ°Ш§ ЩӮШҜ ЩҠШ¬Ш№Щ„ Ш§Щ„Ш¬Шө ШЈЩғШ«Шұ ШөШ№ЩҲШЁШ© ШЁЩғШ«ЩҠШұ Щ…ЩҶ Ш§ШіШӘШ®ШҜШ§Щ… Щ…ЩҶ Ш§Щ„Щ…ЩҲШ§ШҜ Щ„ЩҠЩҲЩҶШ© Щ…Ш«Щ„ Ш§Щ„Щ…Ш·Ш§Ш· ШЈЩҲ Ш§Щ„ШіЩҠЩ„ЩҠЩғЩҲЩҶ.
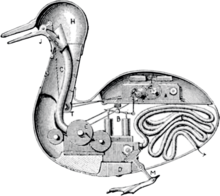 Ш§Щ„ШӘШөЩ…ЩҠЩ… Ш§Щ„ШҜШ§Ш®Щ„ЩҠ Ш§ЩҒШӘШұШ¶ Щ…ЩҶ Ш§Щ„ШЁШ·Ш© Щ…ЩҶ (1738-1739)
Ш§Щ„ШӘШөЩ…ЩҠЩ… Ш§Щ„ШҜШ§Ш®Щ„ЩҠ Ш§ЩҒШӘШұШ¶ Щ…ЩҶ Ш§Щ„ШЁШ·Ш© Щ…ЩҶ (1738-1739)
Ш§Щ„ШӯШұЩғШ©
Ш§Щ„Щ…ШӯШұЩғШ§ШӘ Ш§Щ„ЩҮЩҲШ§ШҰЩҠШ© ЩҠЩ…ЩғЩҶ Ш§ШіШӘШ®ШҜШ§Щ…ЩҮШ§ Щ„ШӘЩӮЩҶЩҠШ§ШӘ Ш§Щ„ШӘШӯШұЩҠЩғ ШөШәЩҠШұШ© ЩҲЩ„ЩғЩҶЩҮШ§ Щ„ЩҠШіШӘ ЩӮЩҲЩҠШ© ШЁЩ…Ш§ ЩҒЩҠЩҮ Ш§Щ„ЩғЩҒШ§ЩҠШ© Щ„ШӘШөШ§Щ…ЩҠЩ… ЩғШЁЩҠШұШ© ЩҲЩҠШ¬ШЁ ШЈЩҶ ШӘШіШӘЩғЩ…Щ„ Щ…Ш№ Ш§Щ„ЩҮЩҠШҜШұЩҲЩ„ЩҠЩғЩҠШ©. Щ„Ш®Щ„ЩӮ ШӯШұЩғШ© ШЈЩғШ«Шұ ЩҲШ§ЩӮШ№ЩҠШ© ШЁШЈШұЩӮШ§Щ… ЩғШЁЩҠШұШ©ШҢ ЩҠШӘЩ… Ш§ШіШӘШ®ШҜШ§Щ… ЩҶШёШ§Щ… ШӘЩ…Ш«ЩҠЩ„ЩҠ Ш№Щ…ЩҲЩ…Ш§ ШҘЩ„Щү ШҘШ№Ш·Ш§ШЎ Щ…Ш¬Щ…ЩҲШ№Ш© ЩғШ§Щ…Щ„Ш© Щ…ЩҶ ШӯШұЩғШ© Ш§Щ„ШіЩҲШ§ШҰЩ„ ШЁШҜЩ„Ш§ Щ…ЩҶ ШЁШіЩҠШ·Ш© ШӯШұЩғШӘЩҠЩҶ Ш§Щ„Щ…ЩҲЩӮЩҒ.
ЩҶЩ…Ш°Ш¬Ш© Ш§Щ„Щ…ШҙШ§Ш№Шұ
ЩҲШ§ШӯШҜ Щ…ЩҶ Ш§Щ„ЩҶЩ…Ш§Ш°Ш¬ Ш§Щ„Ш№Ш§Ш·ЩҒЩҠШ© Ш§Щ„ШЈЩғШ«Шұ ШҙЩҠЩҲШ№Ш§ ЩҮЩҲ ЩҶШёШ§Щ… Ш№Щ…Щ„ ШӘШұЩ…ЩҠШІШ§Щ„ЩҲШ¬ЩҮ (FACS) Ш§Щ„ШӘЩҠ ЩҲШ¶Ш№ШӘЩҮШ§ ШЈЩҠЩғЩ…ЩҶ ЩҲЩҒШұЩҠШіЩҠЩҶ. ЩҠШӯШҜШҜ ЩҶШёШ§Щ… Щ…ШұШ§ЩӮШЁШ© Ш§Щ„ШЈШөЩҲЩ„ Ш§Щ„Щ…ЩҠШҜШ§ЩҶЩҠШ© ШЈЩҶЩҮ Щ…ЩҶ Ш®Щ„Ш§Щ„ ШӘШ№ШЁЩҠШұШ§ШӘ Ш§Щ„ЩҲШ¬ЩҮШҢ ЩҲШ§Щ„ШЁШҙШұ ЩҠЩ…ЩғЩҶ Ш§Щ„ШӘШ№ШұЩҒ Ш№Щ„Щү Ш§Щ„Ш№ЩҲШ§Ш·ЩҒ Ш§Щ„ШЈШіШ§ШіЩҠШ©: Ш§Щ„ШәШ¶ШЁ ЩҲШ§Щ„Ш§ШҙЩ…ШҰШІШ§ШІ ЩҲШ§Щ„Ш®ЩҲЩҒ ЩҲШ§Щ„ЩҒШұШӯ ЩҲШ§Щ„ШӯШІЩҶШҢ ЩҲШ§Щ„ШҜЩҮШҙШ©. ЩҶШёШұЩҠШ© ШЈШ®ШұЩү ЩҮЩҠ ШЈЩҶ Щ…ЩҶ OrtonyШҢ ЩғЩ„ЩҲШұШҢ ЩҲЩғЩҲЩ„ЩҠЩҶШІШҢ ШЈЩҲ ЩҶЩ…ЩҲШ°Ш¬ ШЈЩҲШұЩҠЩҶШӘ ЩҲШ§Щ„Ш°ЩҠ ЩҠШӯШҜШҜ 22 ЩҒШҰШ© Щ…Ш®ШӘЩ„ЩҒШ© Ш§Щ„Ш№Ш§Ш·ЩҒЩҠШ©.
Ш§Щ„ШӘШ№Щ„ЩҠЩ… ЩҲШ§Щ„ШӘШҜШұЩҠШЁ
ШӘЩ… ШӘШ·ЩҲЩҠШұ ШӘЩӮЩҶЩҠШ§ШӘ Ш§Щ„ШӘШӯШұЩҠЩғ Ш№Щ„Щү Ш§Щ„ЩҶШӯЩҲ Ш§Щ„ЩҲШёЩҠЩҒЩҠ Ш§Щ„Ш°ЩҠ ЩҠШ¬Щ…Ш№ ШЁЩҠЩҶ ШӘШ®ШөШөШ§ШӘ Ш§Щ„ЩҮЩҶШҜШіШ© Ш§Щ„Щ…ЩҠЩғШ§ЩҶЩҠЩғЩҠШ©ШҢ Ш§Щ„ШөШЁ / Ш§Щ„ЩҶШӯШӘШҢ ЩҲШӘЩӮЩҶЩҠШ§ШӘ Ш§Щ„ШӘШӯЩғЩ…ШҢ Ш§Щ„ШЈЩҶШёЩ…Ш© Ш§Щ„ШҘЩ„ЩғШӘШұЩҲЩҶЩҠШ© Ш§Щ„ЩғЩҮШұШЁШ§ШҰЩҠШ© /ШҢ ШұШ§ШҜЩҠЩҲ ЩҲШЈЩҠШұШЁШұЩҲШҙЩҠЩҶШә.
ШЁШ№Ш¶ Ш§Щ„ЩғЩ„ЩҠШ§ШӘ ЩҲШ§Щ„Ш¬Ш§Щ…Ш№Ш§ШӘ Щ„Ш§ ШӘЩӮШҜЩ… ШЁШұШ§Щ…Ш¬ ШҜШұШ¬Ш© ЩҒЩҠ Ш§Щ„ШӘШӯШұЩҠЩғ. Ш§Щ„ШЈЩҒШұШ§ШҜ Ш§Щ„Щ…ЩҮШӘЩ…ЩҠЩҶ ЩҒЩҠ Ш§Щ„ШӘШӯШұЩҠЩғ ЩҠШӯШөЩ„ЩҲЩҶ Ш№Щ„Щү ШҙЩҮШ§ШҜШ© ЩҒЩҠ Щ…Ш¬Ш§Щ„ Ш§Щ„ШұЩҲШЁЩҲШӘШ§ШӘ Ш§Щ„ШӘЩҠ ШӘШӘШөЩ„ Ш§ШӘШөШ§Щ„Ш§ ЩҲШ«ЩҠЩӮШ§ ШЁШ§Щ„ШӘШ®ШөШөШ§ШӘ Ш§Щ„Щ…Ш·Щ„ЩҲШЁШ© ЩҒЩҠ ЩҮЩҶШҜШіШ© Ш§Щ„ШӘШӯШұЩҠЩғ.
Ш§Щ„Ш·Щ„Ш§ШЁ ЩҠШӯЩӮЩӮЩҲЩҶ ШҜШұШ¬Ш© Ш§Щ„ШЁЩғШ§Щ„ЩҲШұЩҠЩҲШі ЩҒЩҠ Щ…Ш¬Ш§Щ„ Ш§Щ„ШұЩҲШЁЩҲШӘШ§ШӘ ЩҒЩҠ:
ЩҮЩҶШҜШіШ© Щ…ЩҠЩғШ§ЩҶЩҠЩғЩҠШ©
Ш§Щ„ШұЩҲШЁЩҲШӘШ§ШӘ Ш§Щ„ШөЩҶШ§Ш№ЩҠШ©
ЩҶШёЩ… Ш§Щ„Щ…ЩҠЩғШ§ШӘШұЩҲЩҶЩҠЩғ
ЩҶЩ…Ш°Ш¬Ш© ШЈЩҶШёЩ…Ш© Ш§Щ„ШұЩҲШЁЩҲШӘШ§ШӘ
ЩҮЩҶШҜШіШ© Ш§Щ„ШұЩҲШЁЩҲШӘШ§ШӘ
ЩҶШёШұЩҠШ© ШӘШЈШіЩҠШіЩҠШ© ЩҒЩҠ Ш§Щ„ШұЩҲШЁЩҲШӘШ§ШӘ
Щ…ЩӮШҜЩ…Ш© ЩҒЩҠ Ш§Щ„ШұЩҲШЁЩҲШӘШ§ШӘ
Ш§ЩҶШёШұ Ш§ЩҠШ¶Ш§ЩҺ
Ш§Щ„Щ…ШұШ§Ш¬Ш№
- ^ Ш§ ШЁ animatronics introduction ЩҶШіШ®Ш© Щ…ШӯЩҒЩҲШёШ© 27 ШЈШЁШұЩҠЩ„ 2016 Ш№Щ„Щү Щ…ЩҲЩӮШ№ ЩҲШ§ЩҠ ШЁШ§Щғ Щ…ШҙЩҠЩҶ.
- ^ Ш§ ШЁ animatronics - definition of animatronics in English | Oxford Dictionaries ЩҶШіШ®Ш© Щ…ШӯЩҒЩҲШёШ© 17 ШЈШәШіШ·Ші 2016 Ш№Щ„Щү Щ…ЩҲЩӮШ№ ЩҲШ§ЩҠ ШЁШ§Щғ Щ…ШҙЩҠЩҶ.
- ^ https://web.archive.org/web/20160910092746/http://tsaweb.org/sites/default/files/HS-Animatronics-tri-fold-lite.pdf. Щ…ШӨШұШҙЩҒ Щ…ЩҶ Ш§Щ„ШЈШөЩ„ (PDF) ЩҒЩҠ 2016-09-10.
- ^ Digication e-Portfolio :: Animatronics :: Welcome ЩҶШіШ®Ш© Щ…ШӯЩҒЩҲШёШ© 31 ШЈШәШіШ·Ші 2020 Ш№Щ„Щү Щ…ЩҲЩӮШ№ ЩҲШ§ЩҠ ШЁШ§Щғ Щ…ШҙЩҠЩҶ.
- ^ Android | Definition of Android by Merriam-Webster ЩҶШіШ®Ш© Щ…ШӯЩҒЩҲШёШ© 15 ШҜЩҠШіЩ…ШЁШұ 2017 Ш№Щ„Щү Щ…ЩҲЩӮШ№ ЩҲШ§ЩҠ ШЁШ§Щғ Щ…ШҙЩҠЩҶ.
- ^ https://web.archive.org/web/20120406201534/http://www.eecs.tufts.edu/~mpoor01/DiscertationStuff/Animatronics%20[Robotics]/AndroidScience5.pdf. Щ…ШӨШұШҙЩҒ Щ…ЩҶ Ш§Щ„ШЈШөЩ„ (PDF) ЩҒЩҠ 6 ШЈШЁШұЩҠЩ„ 2012. Ш§Ш·Щ„Ш№ Ш№Щ„ЩҠЩҮ ШЁШӘШ§ШұЩҠШ® ШЈЩғШӘЩҲШЁШұ 2020.
- ^ Frequently Asked Questions - Extreme Dinosaurs - Atlanta | Premier Exhibitions ЩҶШіШ®Ш© Щ…ШӯЩҒЩҲШёШ© 16 ЩҠЩҲЩ„ЩҠЩҲ 2018 Ш№Щ„Щү Щ…ЩҲЩӮШ№ ЩҲШ§ЩҠ ШЁШ§Щғ Щ…ШҙЩҠЩҶ.
- ^ Animatronic | Define Animatronic at Dictionary.com ЩҶШіШ®Ш© Щ…ШӯЩҒЩҲШёШ© 04 Щ…Ш§ШұШі 2016 Ш№Щ„Щү Щ…ЩҲЩӮШ№ ЩҲШ§ЩҠ ШЁШ§Щғ Щ…ШҙЩҠЩҶ.
- ^ 6 CoolвҖ”And CreepyвҖ”Animatronic Advancements ЩҶШіШ®Ш© Щ…ШӯЩҒЩҲШёШ© 23 ШЈЩғШӘЩҲШЁШұ 2014 Ш№Щ„Щү Щ…ЩҲЩӮШ№ ЩҲШ§ЩҠ ШЁШ§Щғ Щ…ШҙЩҠЩҶ.
- ^ Bedini, Silvio A. (1964). "The Role of Automata in the History of Technology". Technology and Culture. 5 (1): 24. doi:. Ш¬Ш§ЩҠШіШӘЩҲШұ 3101120. ЩҶШіШ®Ш© Щ…ШӯЩҒЩҲШёШ© 19 ШҜЩҠШіЩ…ШЁШұ 2018 Ш№Щ„Щү Щ…ЩҲЩӮШ№ ЩҲШ§ЩҠ ШЁШ§Щғ Щ…ШҙЩҠЩҶ.
- ^ Fryer, David M.; Marshall, John C. (1979). "The Motives of Jacques de Vaucanson". Technology and Culture. 20 (2): 257. doi:. Ш¬Ш§ЩҠШіШӘЩҲШұ 3103866. ЩҶШіШ®Ш© Щ…ШӯЩҒЩҲШёШ© 19 ШҜЩҠШіЩ…ШЁШұ 2018 Ш№Щ„Щү Щ…ЩҲЩӮШ№ ЩҲШ§ЩҠ ШЁШ§Щғ Щ…ШҙЩҠЩҶ.
- ^ The Defecating Duck, or, the Ambiguous Origins of Artificial Life | Critical Inquiry: Vol 29, No 4 ЩҶШіШ®Ш© Щ…ШӯЩҒЩҲШёШ© 2020-09-15 Ш№Щ„Щү Щ…ЩҲЩӮШ№ ЩҲШ§ЩҠ ШЁШ§Щғ Щ…ШҙЩҠЩҶ.
- ^ "An introduction to Animatronics". prezi.com. Щ…ШӨШұШҙЩҒ Щ…ЩҶ Ш§Щ„ШЈШөЩ„ ЩҒЩҠ 2019-04-04. Ш§Ш·Щ„Ш№ Ш№Щ„ЩҠЩҮ ШЁШӘШ§ШұЩҠШ® 2016-12-25.
- ^ Corporation, Bonnier (25 Dec 2016). Popular Science (ШЁШ§Щ„ШҘЩҶШ¬Щ„ЩҠШІЩҠШ©). Bonnier Corporation. Archived from the original on 2020-04-23.
- ^ ErnstШҢ Heinrich Arnold (4 ШЈШәШіШ·Ші 2005). "MH-1, a computer-operated mechanical hand". ResearchGate. Щ…ШӨШұШҙЩҒ Щ…ЩҶ Ш§Щ„ШЈШөЩ„ ЩҒЩҠ 2019-04-04.
- ^ Ayala, Alfredo Medina (20 Oct 2010). Ficarra, Francisco V. Cipolla; Lozano, Carlos de Castro; JimГ©nez, Mauricio PГ©rez; Nicol, Emma; Kratky, Andreas; Cipolla-Ficarra, Miguel (eds.). Advances in New Technologies, Interactive Interfaces, and Communicability. Lecture Notes in Computer Science (ШЁШ§Щ„ШҘЩҶШ¬Щ„ЩҠШІЩҠШ©). Springer Berlin Heidelberg. pp. 8вҖ“15. DOI:10.1007/978-3-642-20810-2_2#page-1. ISBN:9783642208096. Archived from the original on 2018-11-20.
- ^ WebbШҢ Michael (1 ЩҠЩҶШ§ЩҠШұ 1983). "The Robots Are Here! The Robots Are Here!". Design Quarterly Ш№. 121: 4вҖ“21. DOI:10.2307/4091102. Щ…ШӨШұШҙЩҒ Щ…ЩҶ Ш§Щ„ШЈШөЩ„ ЩҒЩҠ 2020-04-23.
- ^ Clark, Eric (9 Jan 2007). The Real Toy Story: Inside the Ruthless Battle for America's Youngest Consumers (ШЁШ§Щ„ШҘЩҶШ¬Щ„ЩҠШІЩҠШ©). Simon and Schuster. ISBN:9780743298896. Archived from the original on 2020-04-23.
|
|---|
| Ш§Щ„Щ…ЩӮШ§Щ„Ш§ШӘ Ш§Щ„ШұШҰЩҠШіЩҠШ© | | |
|---|
| Ш§Щ„ШЈЩҶЩҲШ§Ш№ | |
|---|
| Ш§Щ„ШӘШөЩҶЩҠЩҒШ§ШӘ | |
|---|
| Ш§Щ„ШӯШұЩғШ© | |
|---|
| ШЈШЁШӯШ§Ш« | |
|---|
|
10.2307/3101120
10.2307/3103866

.jpg)





