| Descrição |
Figura |
Momento(s) de inércia |
Comentários
|
| Massa pontual m a uma distância r dos eixos de rotação.
|
|

|
Um ponto de massa não tem um momento de inércia em torno de seu próprio eixo, mas usando o teorema dos eixos paralelos um momento de inércia em torno de um eixo de rotação é distante alcançado.
|
Duas massas pontuais, M e m, com a massa reduzida  e separadas por uma distância x. e separadas por uma distância x.
|
|

|
—
|
Barra de comprimento L e massa m
(Eixo de rotação no fim da barra)
|
![]()
|
 [1] [1]
|
Esta expressão assume que a haste é um fio infinitamente fino (mas rígida). Este também é um caso especial da placa rectangular fina com o eixo de rotação ao final da placa, com h = L e w = 0.
|
| Barra de comprimento L e massa m
|
|
 [1] [1]
|
Esta expressão assume que a haste é um fio infinitamente fino (mas rígida). Este é um caso especial da placa rectangular fina com o eixo de rotação no centro do prato, com w = L e h = 0.
|
| Aro circular de raio r e massa m
|

|


|
Este é um caso especial de um toro com b = 0 (ver abaixo) ou de um tubo cilíndrico de paredes espessas, com as extremidades abertas com r1 = r2 e h = 0.
|
| Disco fino de raio r e massa m
|
|


|
Este é um caso especial do cilíndro sólido com h = 0. Os momentos  são consequência do teorema dos eixos perpendiculares. são consequência do teorema dos eixos perpendiculares.
|
| Casca cilíndrica fina com as extremidades abertas, de raio r e massa m
|

|
 [1] [1]
|
Esta expressão assume a espessura da casca é insignificante. É um caso especial do tubo cilíndrico de paredes espessas para r1 = r2.
Além disso, um ponto de massa (m) na extremidade de uma barra de comprimento r tem neste mesmo momento de inércia e a quantidade r é chamado o raio de rotação.
|
| Cilíndro sólido de raio r, altura h e massa m
|

|
[1]

|
Este é um caso especial do tubo cilíndrico de paredes espessas, com r1 = 0. (Note: eixo X-Y deve ser trocado por uma referência que segue a regra da mão direita.)
|
| Tubo cilíndrico de paredes espessas com extremidades abertas, raio interno r1, raio externo r2, comprimento h e massa m
|

|
 [1][2] [1][2]
![{\displaystyle I_{x}=I_{y}={\frac {1}{12}}m\left[3\left({r_{2}}^{2}+{r_{1}}^{2}\right)+h^{2}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/84b03616c2211bce13d6776932c0d56c5b8dabbc)
ou quando a espessura normal tn é definida = t/r e deixando r = r2,
então 
|
Com a densidade ρ e a mesma geometria  
|
| Tetraedro de lado s e massa m
|

|


|
—
|
| Octaedro (oco) de lado s e massa m
|

|

|
—
|
| Octaedro (sólido) de lado s e massa m
|
|

|
—
|
| Esfera (oca) de raio r e massa m
|
|
 [1] [1]
|
Uma esfera oca pode ser definida por dois aros circulares infinitamente finos, em que o raio varia de 0 a r (ou por um único aro cujo raio varia de -r a r).
|
| Bola (sólida) de raio r e massa m
|

|
 [1] [1]
|
Uma esfera oca pode ser definida por dois aros circulares infinitamente finos, em que o raio varia de 0 a r (ou por um único aro cujo raio varia de -r a r).
Ela também pode ser definida por esferas ocas, infinitamente finas, cujo raio varia de 0 a r.
|
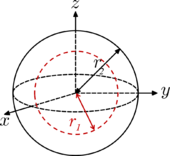
| Esfera (casca) de raio r2, com cavidade cocentrica de raio r1 e massa m
|
|
![{\displaystyle I={\frac {2m}{5}}\left[{\frac {{r_{2}}^{5}-{r_{1}}^{5}}{{r_{2}}^{3}-{r_{1}}^{3}}}\right]\,\!}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0cc4c297ada2969a9f6f8e0341dc0e62556df495) [1] [1]
|
Quando a cavidade central tiver raio r1 = 0, o objeto é uma bola sólida (ver acima).
Se r1 = r2, ![{\displaystyle \left[{\frac {{r_{2}}^{5}-{r_{1}}^{5}}{{r_{2}}^{3}-{r_{1}}^{3}}}\right]={\frac {5}{3}}{r_{2}}^{2}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7f2e02d109e57a898d29f0146d42ca7185b843d2) , o objeto é uma esfera oca. , o objeto é uma esfera oca.
|
| Cone circular de raio r, altura h e massa m
|

|
 [3] [3]
 [3] [3]
|
—
|
| Toro de um tubo de raio a, raio da seção transversal b e massa m.
|

|
Sobre um eixo do plano diametral:  [4] [4]
Sobre o eixo vertical:  [4] [4]
|
—
|
| Elipsoide (sólido) de semieixos a, b e c com eixo de rotação em a e massa m
|

|



|
—
|
Placa retangular fina de altura h, espessura w e massa m
(Eixo de rotação no fim da placa)
|

|

|
—
|
| Placa retangular fina de altura h, espessura w e massa m
|

|
 [1] [1]
|
—
|
| Cuboide sólido de altura h, espessura w, profundidade d e massa m
|

|



|
Para cubo com mesma orientação e lados de comprimento  , ,  . .
|
| Cuboide sólido de altura D, espessura W, comprimento L e massa m com sua diagonal mais longa como eixo de rotação.
|
|

|
Para um cubo de lados ,  . .
|
Polígono plano de vértices  , ,  , ,  , ..., , ...,  e e
massa  , girando em torno de um eixo perpendicular ao plano e passando pela origem. , girando em torno de um eixo perpendicular ao plano e passando pela origem.
|

|

|
Esta expressão assume que o polígono tem forma de estrela. Os vetores , , , ..., são vectores posição dos vértices.
|
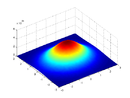
| Disco infinito de massa normalmente distribuída ao longo do plano perpendicular ao eixo de rotação
(i.e.  Onde:
Onde:  é a função densidade de massa). é a função densidade de massa).
|
|

|
—
|






















